

A bionic flexible wrist
A flexible, wrist-hand technology, applied in the field of bionic flexible wrist-hand, can solve the problems of difficult control, small number of drives, high manufacturing cost, etc., and achieve the effect of small number of drives, low manufacturing cost, and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
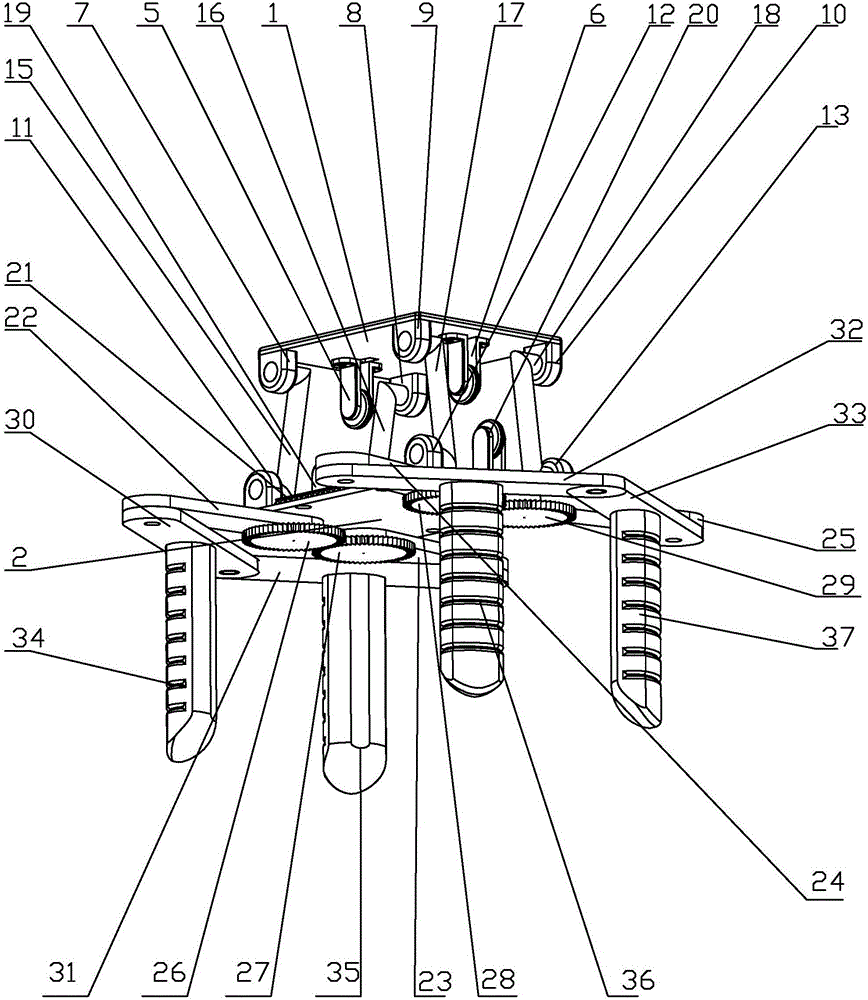
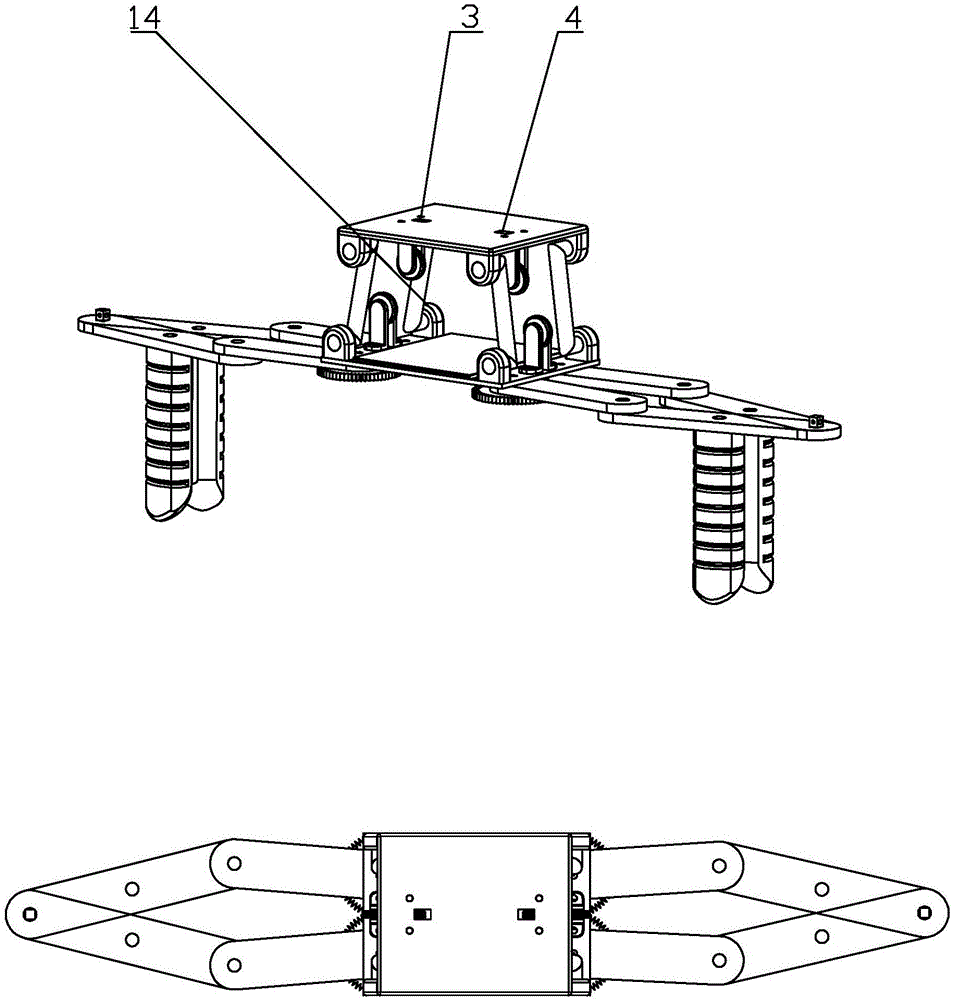
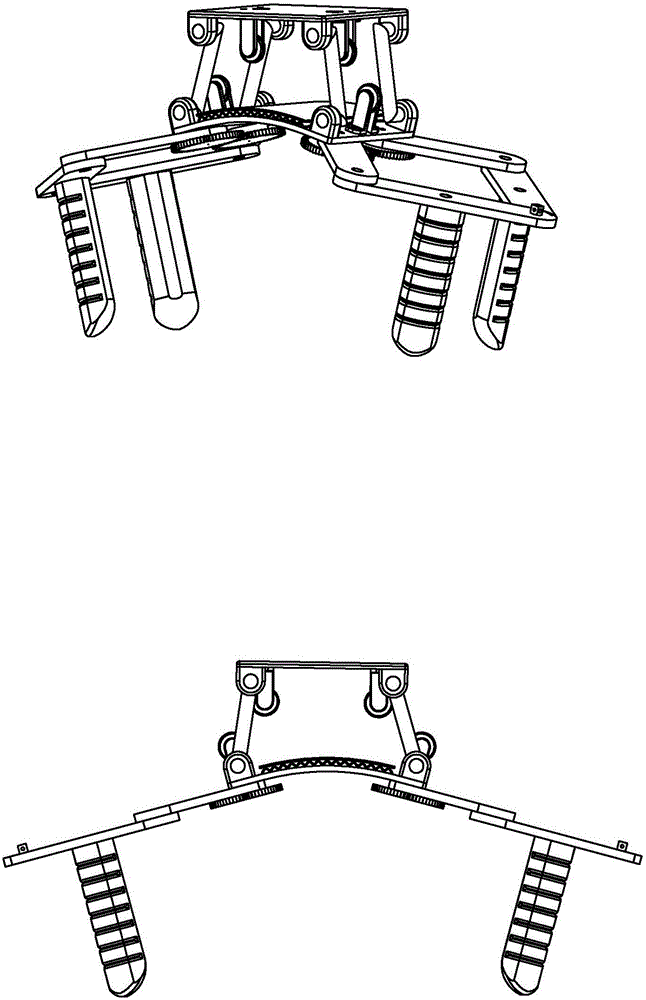
[0022] A bionic flexible wrist, comprising a top plate 1 and a palm mounting plate 2, two wiring holes are opened on the top plate 1; fixed pulleys 5, 6 and hinges 7-10 are installed on the top plate 1; A hinge 11-14 is installed on the mounting plate 2; the hinge 11-14 is respectively connected to the hinge 7-10 on the top plate through a swing bar 15-18; a fixed pulley 19-20 is installed on the palm mounting plate 2; A shape memory alloy 21 is installed on the palm mounting plate 2; connecting rods 22-25 are installed through hinges on the palm mounting plate 2; each of the connecting rods 22-25 is fixedly connected with a gear, wherein gear one and Gear 2 cooperates, gear 3 cooperates with gear 4; the connecting rods 22-25 are connected to the finger mounting plates 30-33 through hinges; the finger mounting plates 30-33 are each equippe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More