

Magnetorheological fluid-assisted flexible palm adaptive underactuated robotic hand device
A magneto-rheological fluid and robotic hand technology, applied in the field of robotics, can solve the problems of difficult miniaturization, high cost, and high noise, and achieve the effects of enhanced reliability, low maintenance cost, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
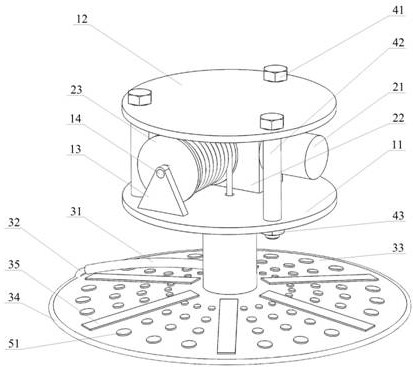
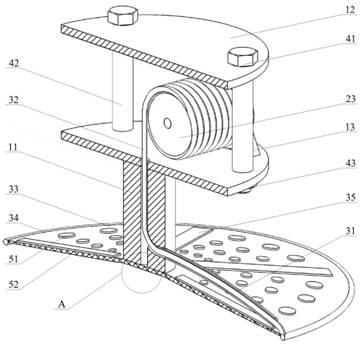
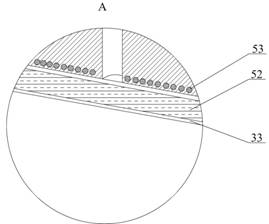
[0040] An embodiment of a magneto-rheological fluid-assisted flexible palm surface self-adaptive underactuated robot hand device designed by the present invention, such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 , Figure 9 , Figure 10 , Figure 11 , Figure 12 , Figure 13 , Figure 14 , Figure 15shown. This embodiment includes a flexible member 33, at least one tendon rope 32, at least two fingers 35, at least one channel 34, a coil 51, a magnetorheological fluid 52, at least one driver 21, and a base 11; the flexible member 33 The middle part is fixedly connected with the base 11, and the inside of the flexible member 33 is sealed with magnetorheological fluid 52; the finger 35 is arranged on the flexible memb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More