

A Visual Slam Loop Closure Detection Method Fused with Geometric Information
A technology of geometric information and detection methods, applied in digital data information retrieval, geographic information database, structured data retrieval, etc., can solve the problem of difficult to load high-performance equipment such as large-scale laser radar and omnidirectional cameras, and achieve cost savings , the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] A visual SLAM loop closure detection method fused with geometric information proposed by the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Advantages and features of the present invention will be apparent from the following description and claims.
[0055] A visual SLAM loop closure detection method that fuses geometric information, comprising the steps of:
[0056] S1: Obtain the real key frame corresponding to each real camera in the SLAM system;
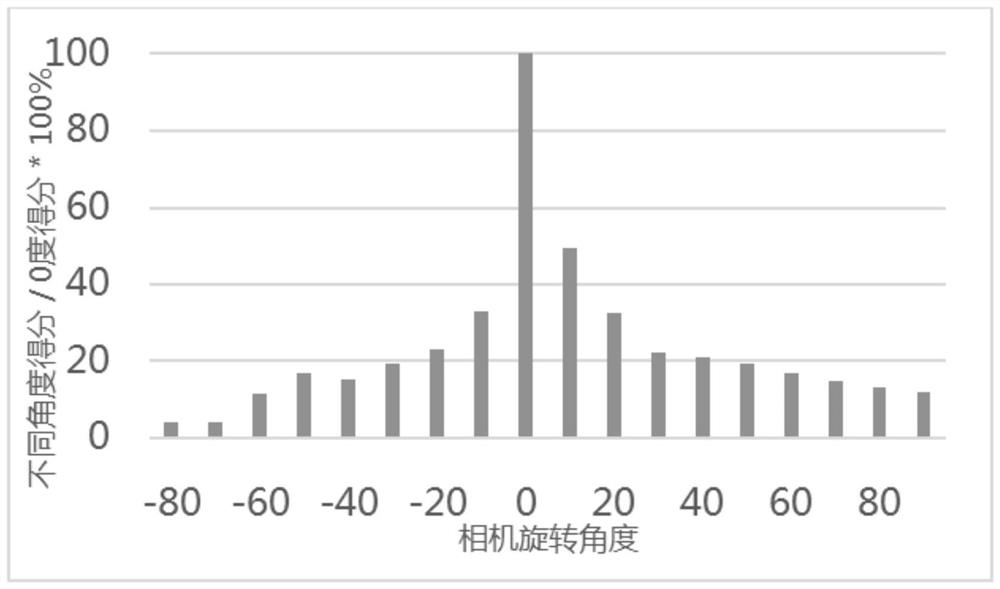
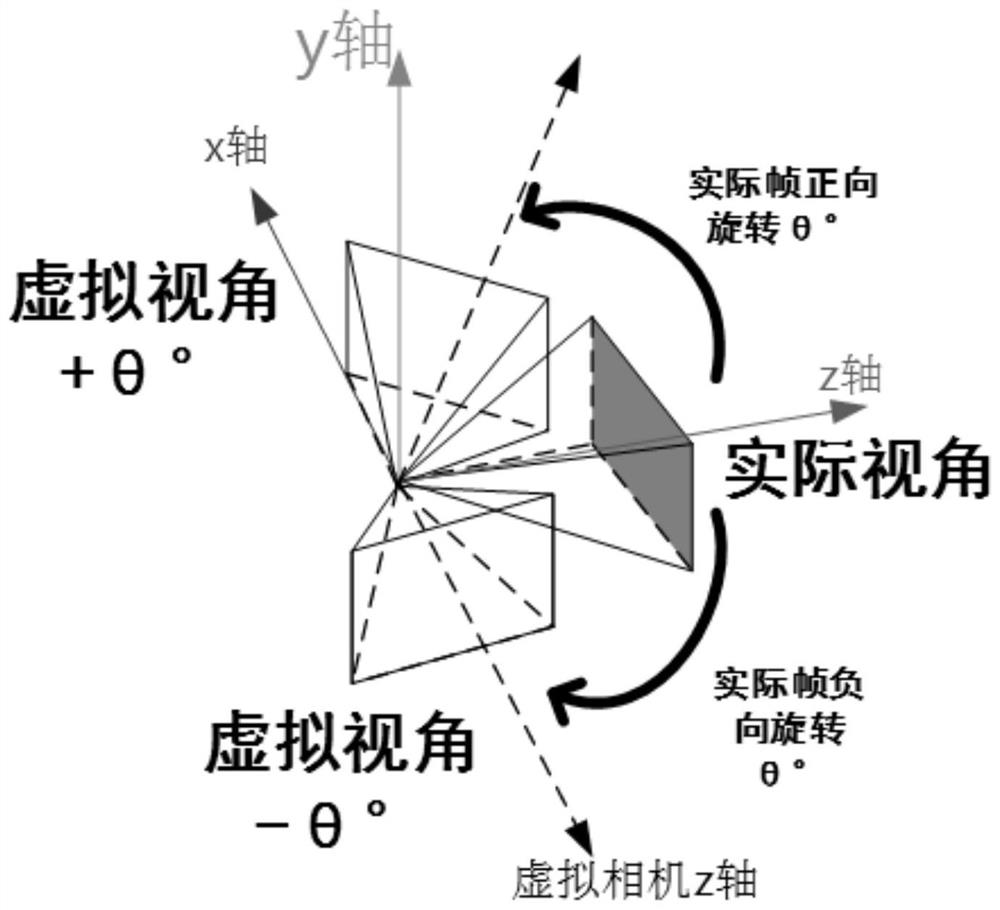
[0057] S2: Determine the perspective change of the corresponding virtual camera around each real camera, and calculate the pose of the virtual camera in the SLAM system;
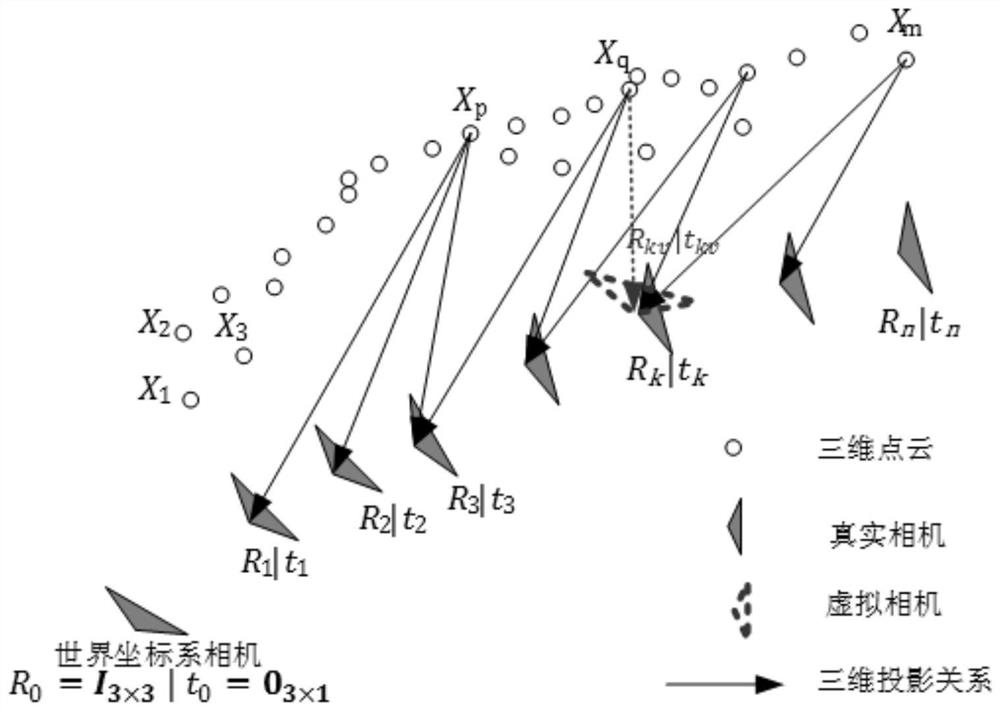
[0058] S3: Reconstruct the 3D point cloud in the SLAM system according to the real key frame;
[0059] S4: Calculate the pixel coordinates of each 3D point in the 3D point cloud in the virtual key frame according to the pinhole camera model and projection geometry;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More