

A laser slam loopback detection method and system
A detection method and loopback technology, applied in image analysis, instrumentation, calculation, etc., can solve problems such as large amount of calculation and large amount of calculation, and achieve the effect of improving efficiency and reducing the amount of data calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
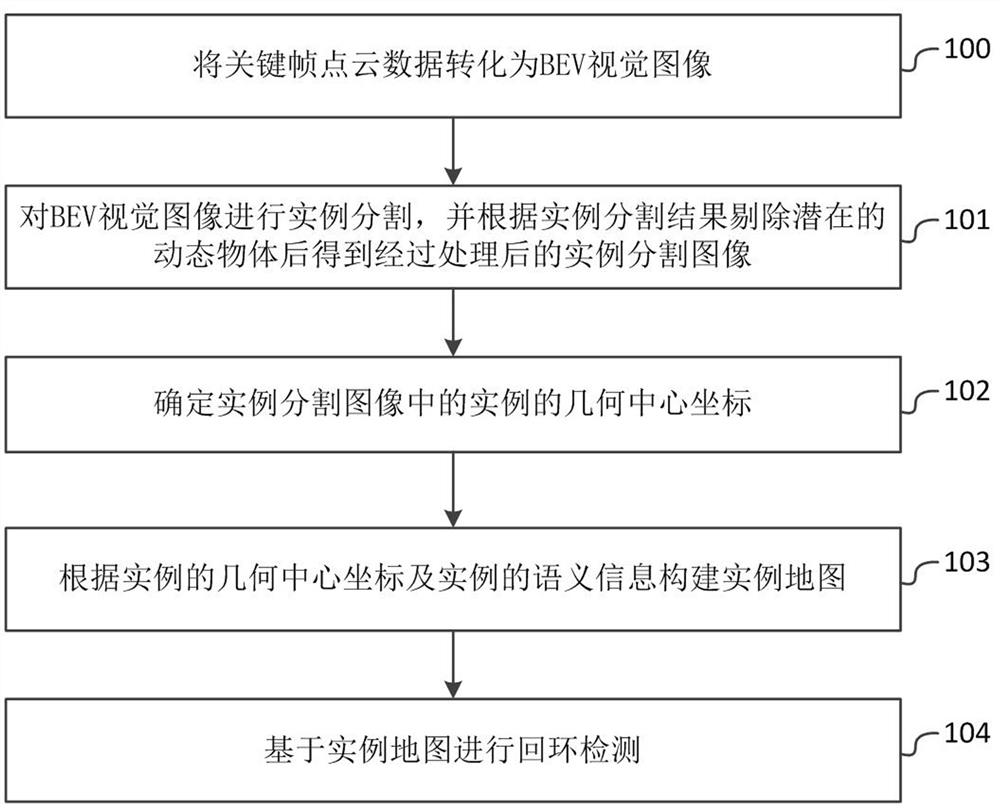
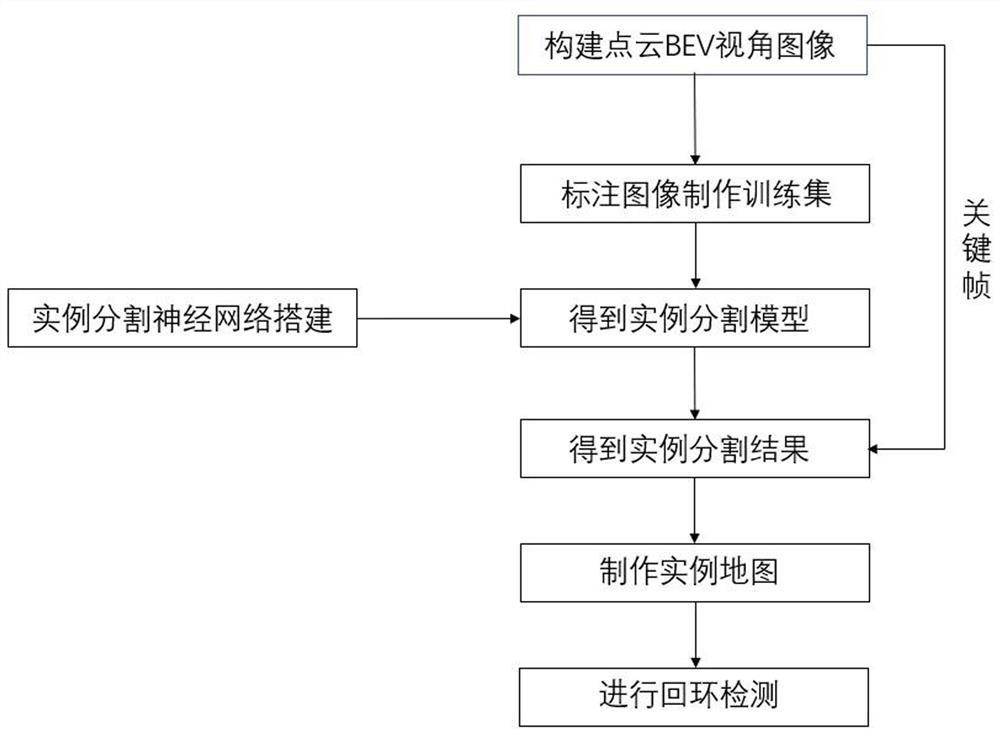
[0051] Step 100: Convert the key frame point cloud data into a BEV (Bird Eye View, bird's eye view) visual image. in real
[0058] Step 102: Determine the geometric center coordinates of the instance in the instance segmentation image. Specifically, the segmented image
[0059] Step 103: construct an instance map according to the geometric center coordinates of the instance and the semantic information of the instance. Specifically, the first
[0061] Step 104: Perform loop closure detection based on the instance map. The loopback detection mechanism of this method is a step-by-step comparison based on two
[0064] During slam high-frequency mapping, a separate thread is used to obtain key frames at 1 Hz and convert them into BEVs
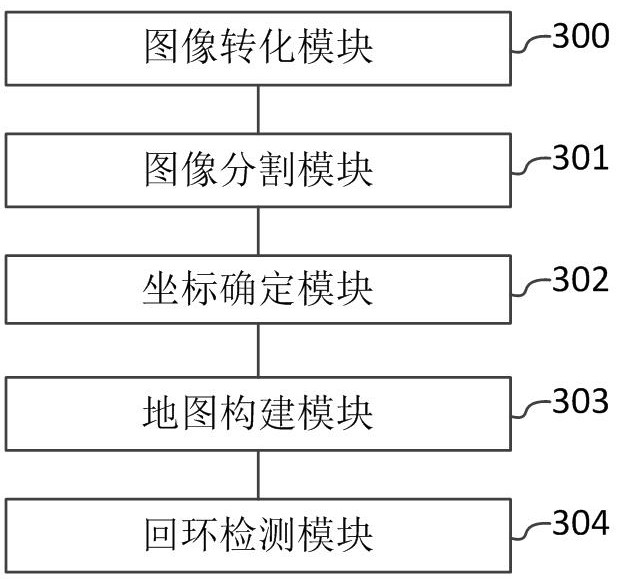
[0068] The image conversion module 300 is used to convert the key frame point cloud data into a BEV visual image.
[0070] The coordinate determination module 302 is used to determine the geometric center coordinates of the instances in the instance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More