A closed-chain multi-arm robot compliance control method
A compliant control and robotics technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as inapplicability, accumulation of superimposed errors, and affecting multi-arm operation performance, so as to achieve control accuracy, ensure synchronization compliance, and ensure Effects on system security and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments:
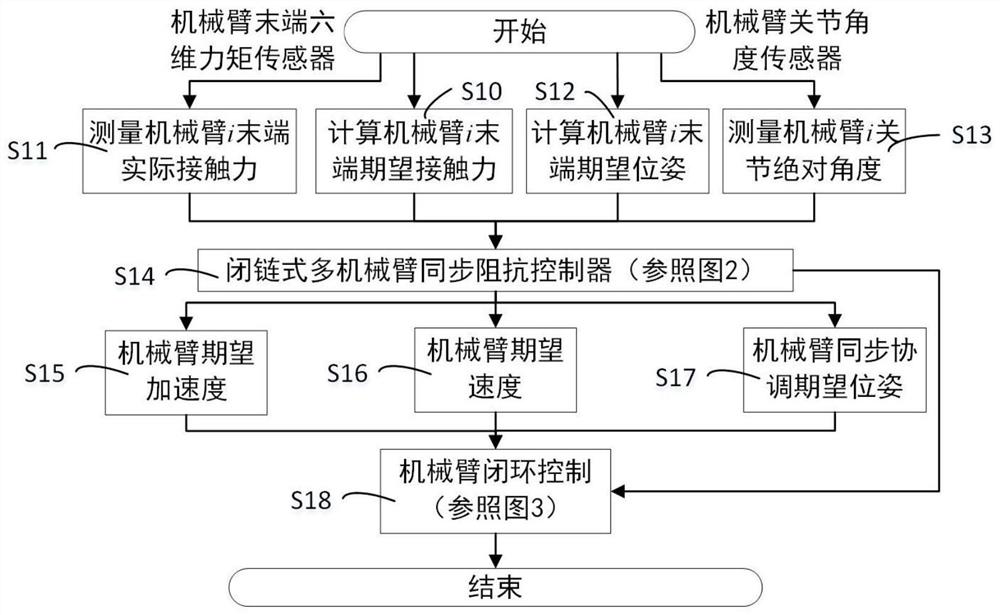
[0049] Such as figure 1 As shown, a closed-chain multi-arm robot compliant control method, assuming that the robot has n mechanical arms, the sequence numbers are i=1,...,I; the specific steps of the control method are as follows:
[0050] Step S10, calculating the expected contact force at the end of the manipulator i by the manipulator operation task;
[0051] Step S11, measuring the actual contact force at the end of the manipulator i through the six-dimensional torque sensor installed at the end of the manipulator i;
[0052] Step S12, calculate the expected pose of the end of the robot arm i by the robot arm operation task;
[0053] Step S13, measuring the absolute angle of the joint i of the manipulator...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com