

Device and control method for improving balance and walking speed of biped robot
A bipedal robot, walking speed technology, applied in the family, can solve the problems of long adjustment time, slow movement speed, slow adjustment speed, etc., and achieve the effect of reducing adjustment time, walking stability, and improving walking speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solutions in the embodiments of the present invention will be described clearly and in detail below in conjunction with the drawings in the embodiments of the present invention. The described embodiments are only a part of the embodiments of the present invention.
[0033] The technical solutions of the present invention to solve the above technical problems are:
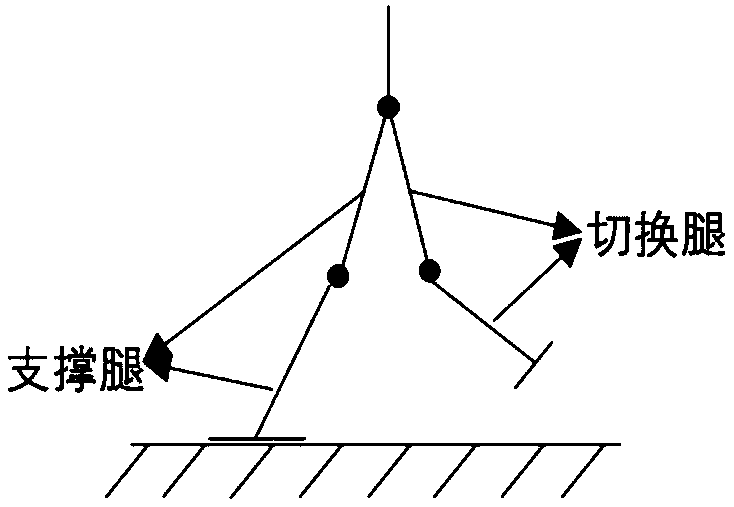
[0034] ZMP is an important indicator for judging whether the robot will fall and whether the soles of their feet are in contact with the ground. ZMP refers to a point on the ground. When the robot is walking, the ground reaction force received by the soles of the feet has zero moment component on the ground around this point. If the point is within the support polygon formed by the soles of the feet, the robot will not fall and the soles of the feet can contact the ground. The present invention will redesign the feet of the biped robot on the basis of ZMP theory, add a certain structure, and act on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More