

Landing and Walking Integrated Robot
A robot and fuselage technology, which is applied in the field of landing and walking integrated robots, can solve the problems of limited robot carrying capacity and low flexibility, and achieve the effects of strong carrying capacity, strong attitude adjustment ability, and strong obstacle surmounting ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
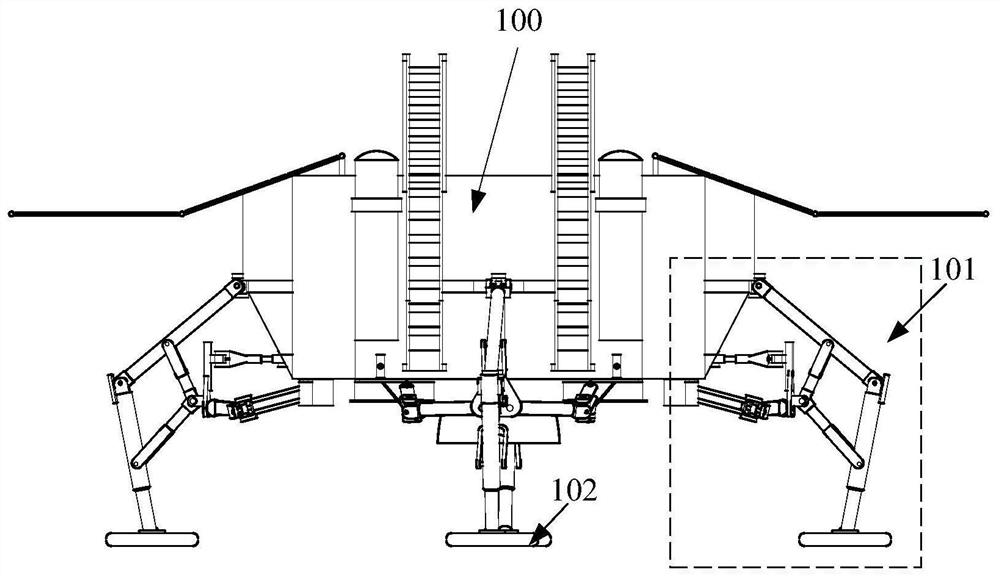
[0023] like figure 1 As shown, this embodiment includes: the fuselage 100 and four sets of mechanical legs 101 arranged around the side wall of the fuselage 100 to achieve overall three-degree-of-freedom movement, and the mechanical legs 101 have a good ability to bear impact force.
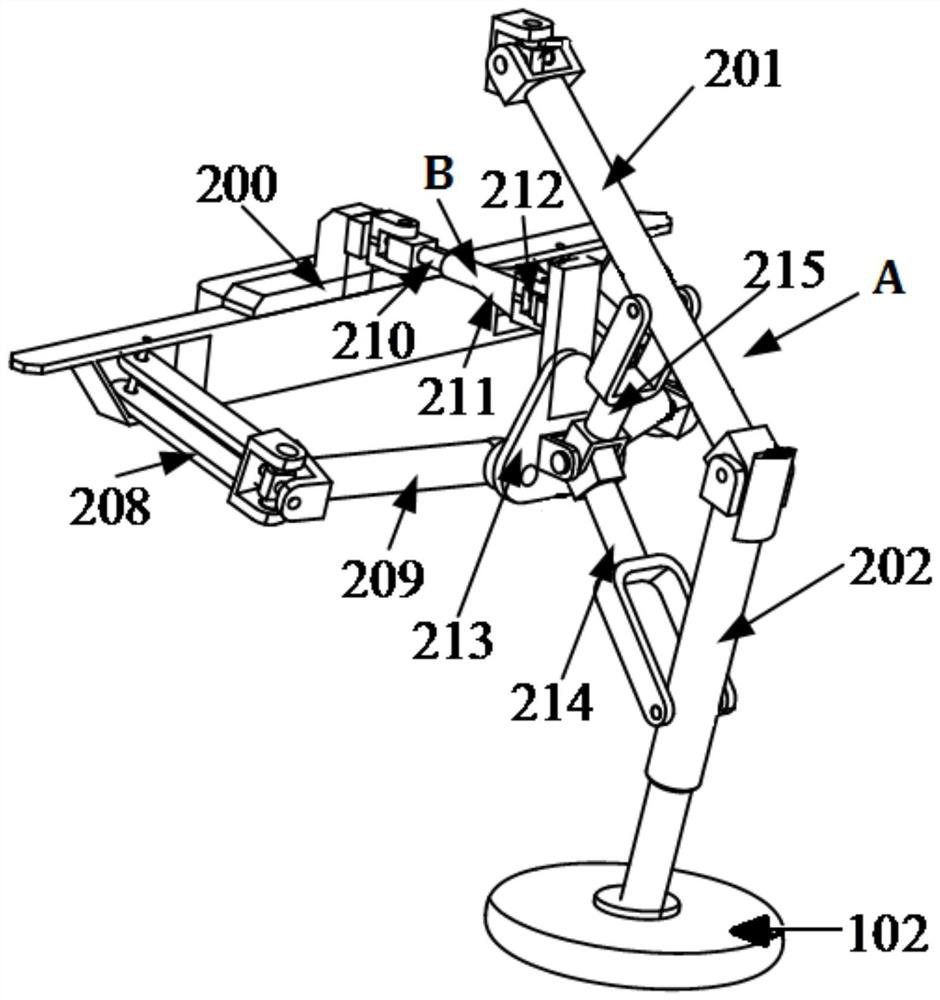
[0024] like figure 2 As shown, a fuselage link 200 is provided between the fuselage 100 and the mechanical leg 101 .
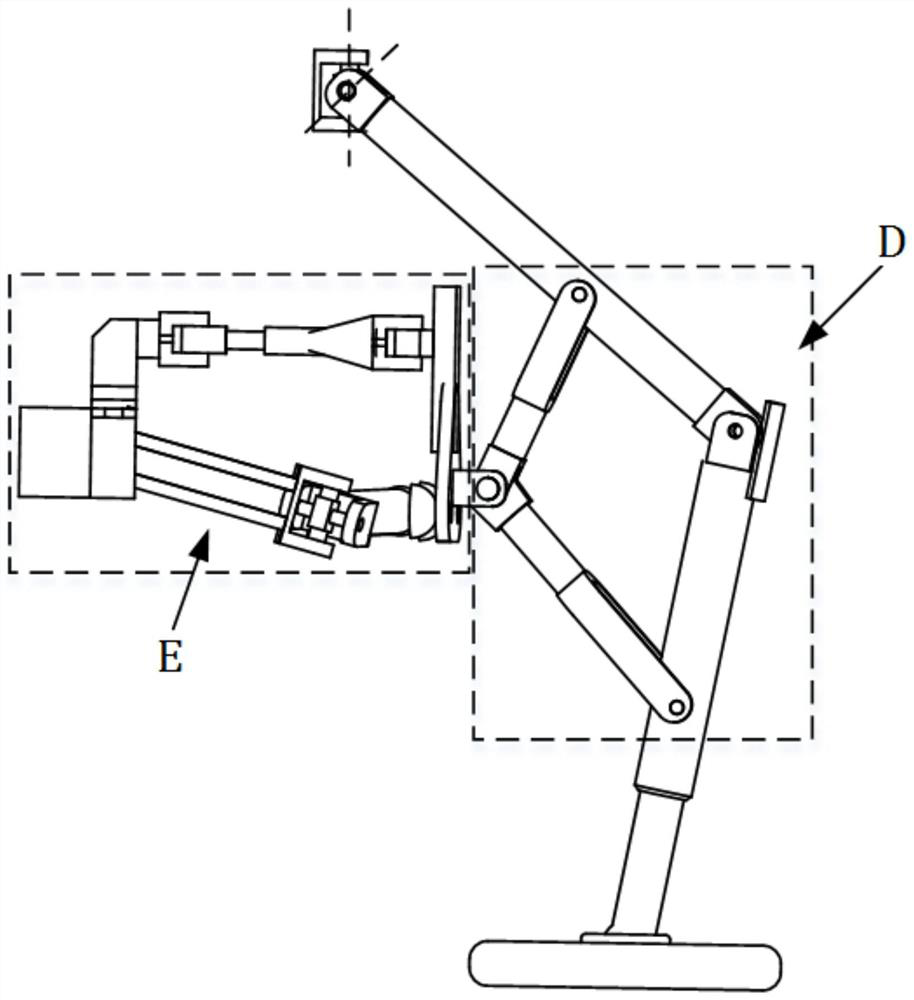
[0025] like image 3 As shown, the mechanical leg 101 includes: a strut A and a foot pad 102 connected with it through a ball pair, a connecting mechanism D rotatably connected with the strut A, and a parallel mechanism E connected with the connecting mechanism D.
[0026] like figure 2 As shown, the pillar A includes: two first rods 201 and second rods 202 connected by a rotating pair, the first rod 201 is connected with the connecting mechanism D, and the second rod 202 and the foot pad 102 pass through The ball pair connection realizes the rotation of the foot pad 102 in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More