

Cooperative control method and device for mine unmanned vehicles
An unmanned vehicle and cooperative control technology, which is applied in the traffic control system of road vehicles, vehicle position/route/height control, two-dimensional position/channel control, etc., can solve conflicts and difficult Control issues such as multiple mine unmanned vehicles to avoid conflicts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, not all the embodiments. According to the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
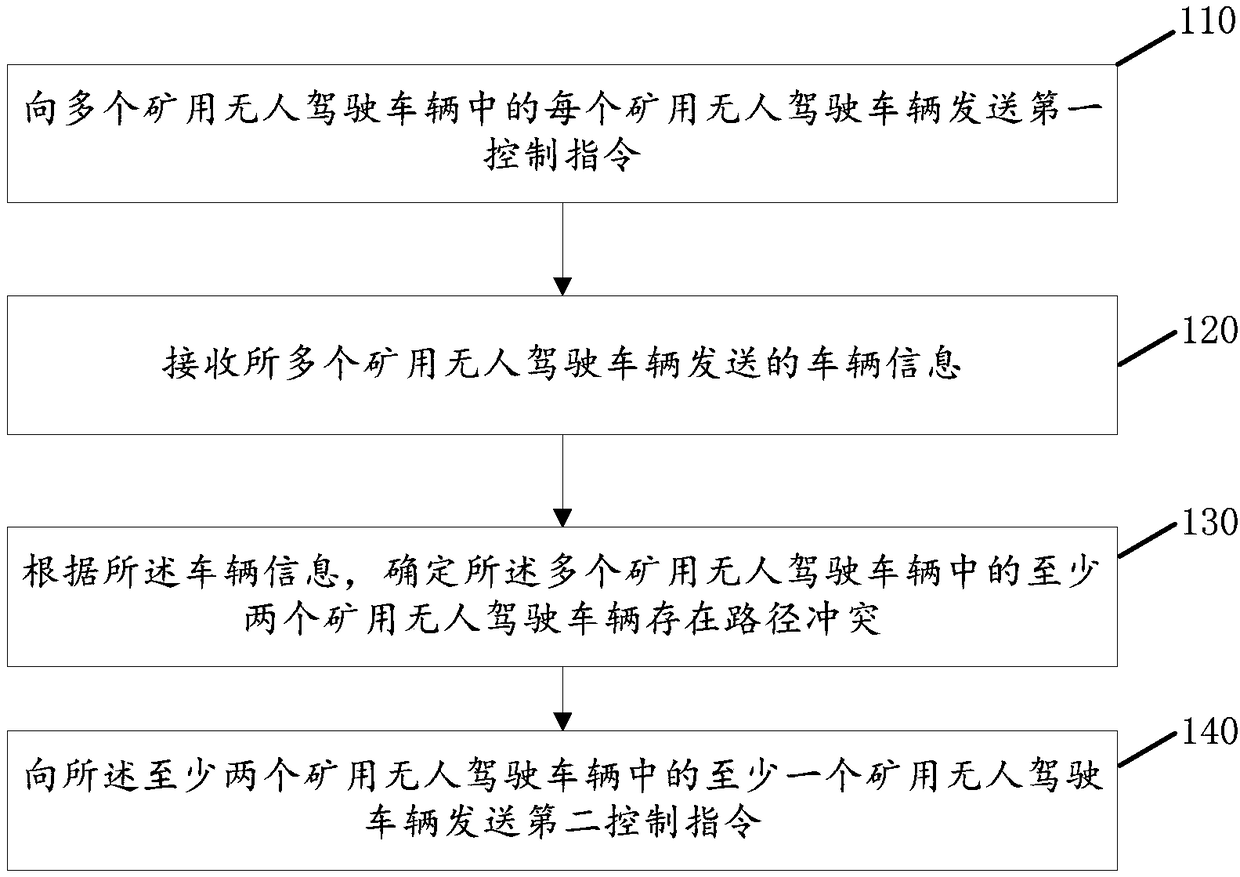
[0029] figure 1 It is a schematic flowchart of a collaborative control method for unmanned mining vehicles according to an embodiment of the present invention. figure 1 The method can be executed by a computing device, such as a server. figure 1 The collaborative control method of mining unmanned vehicles includes the following.
[0030] 110. Send a first control instruction to each of the plurality of unmanned mining vehicles, where the first ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More