

A method for positioning and identifying pointer instruments based on machine vision
A machine vision and recognition method technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve the problems of high requirements for image clarity and strong contrast, difficult to obtain dial information, difficult to obtain scale information, etc. Achieve accurate and reliable identification results, avoid the influence of interference factors, and improve the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Below in conjunction with example the present invention is described in detail:
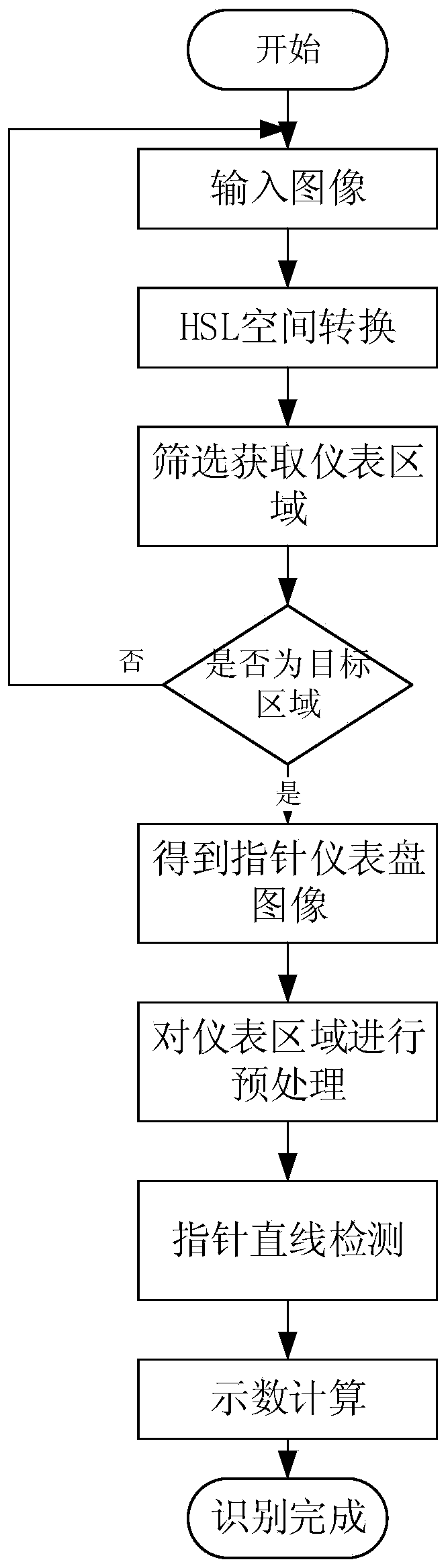
[0058] Such as figure 1 As shown, the pointer instrument positioning and identification method based on machine vision of the present invention comprises the following steps:
[0059] (1) Obtain the image of the instrument cabinet (note: the instrument panel is located on the surface of the instrument cabinet):
[0060] Capture images of the instrument cabinet with a digital camera or video camera.
[0061] (2) Segment the image of the instrument cabinet to obtain the image of the instrument panel, as follows:
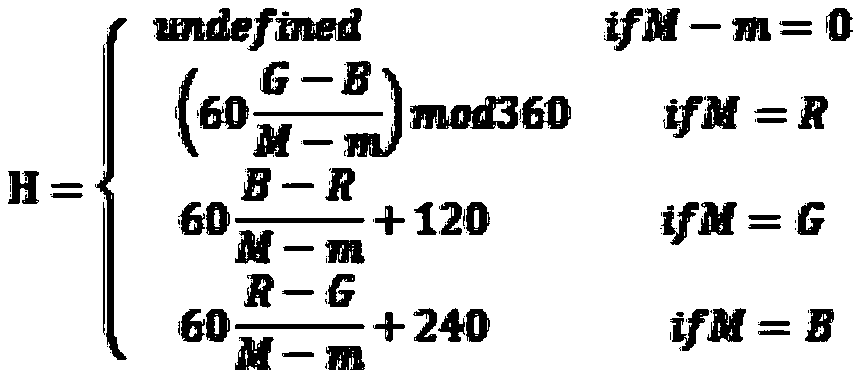
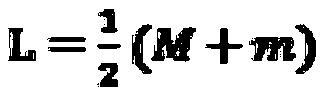
[0062] A. Convert the image of the instrument cabinet from RGB to HSL. The specific conversion formula is as follows:
[0063]
[0064]
[0065]
[0066] Wherein, M=max(R,G,B), m=min(R,G,B).
[0067] B. Binarize the luminance map of the instrument cabinet. The L component of the HSL space image is extracted to obtain the brightness map of the instrument cabinet. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More