

UAV based image splicing method and device
A technology of image stitching and drones, applied in the field of drones, can solve the problems of low stitching speed and low accuracy, and achieve the effects of low hardware requirements, eliminating ghost images, and improving matching speed and stitching speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
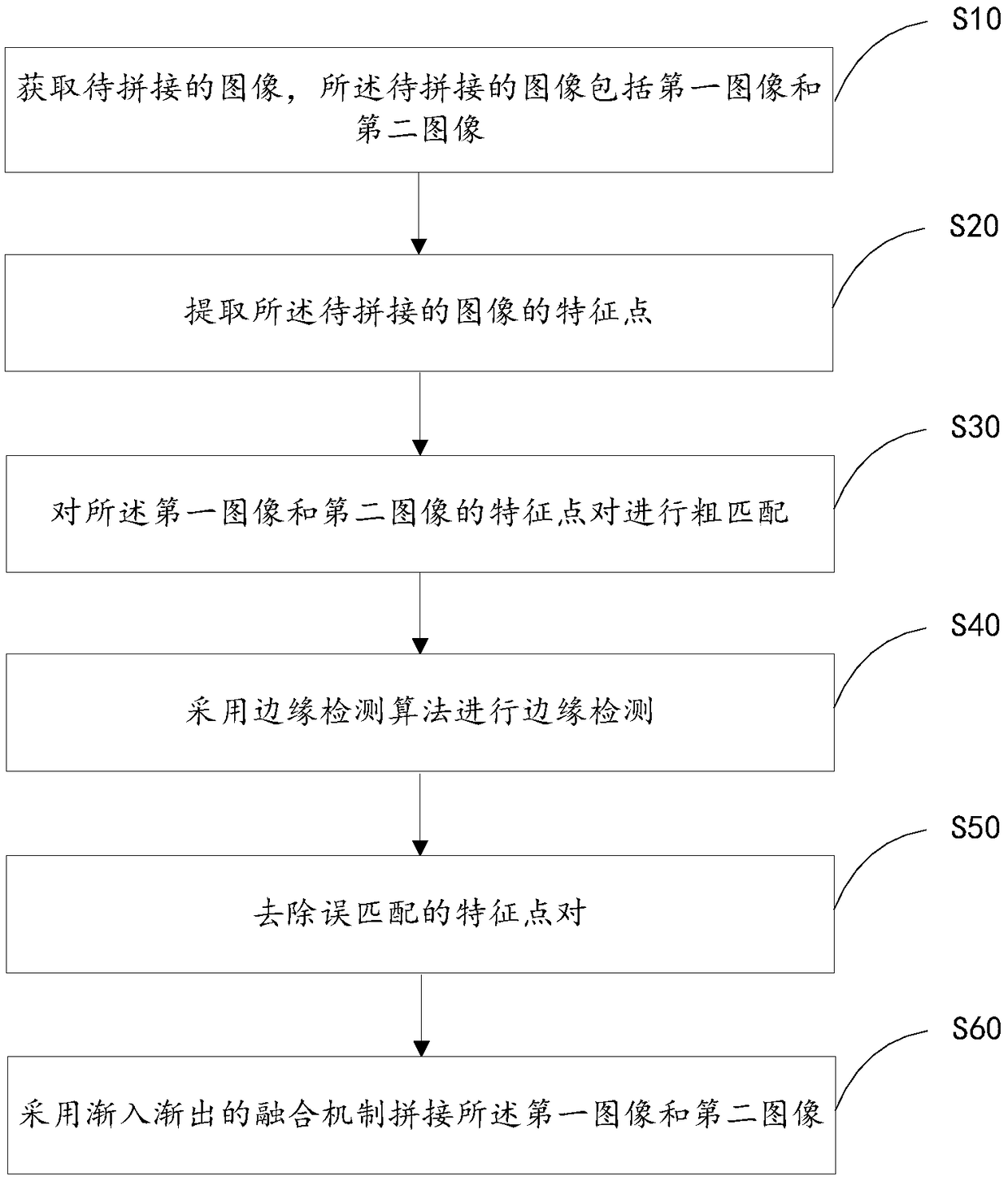
[0054] like figure 1 Shown, in the present embodiment, a kind of image mosaic method based on drone, comprises:
[0055] S10. Acquiring images to be spliced, where the images to be spliced include a first image and a second image;
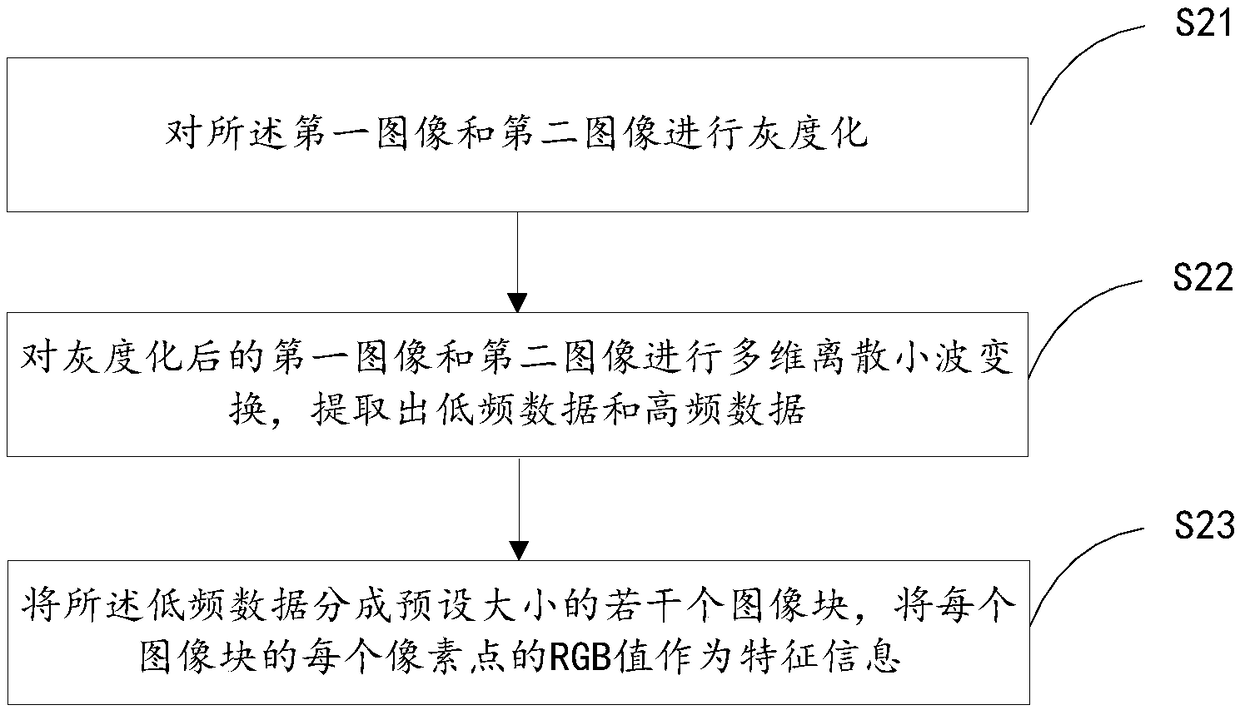
[0056] S20. Extracting feature points of the image to be stitched;
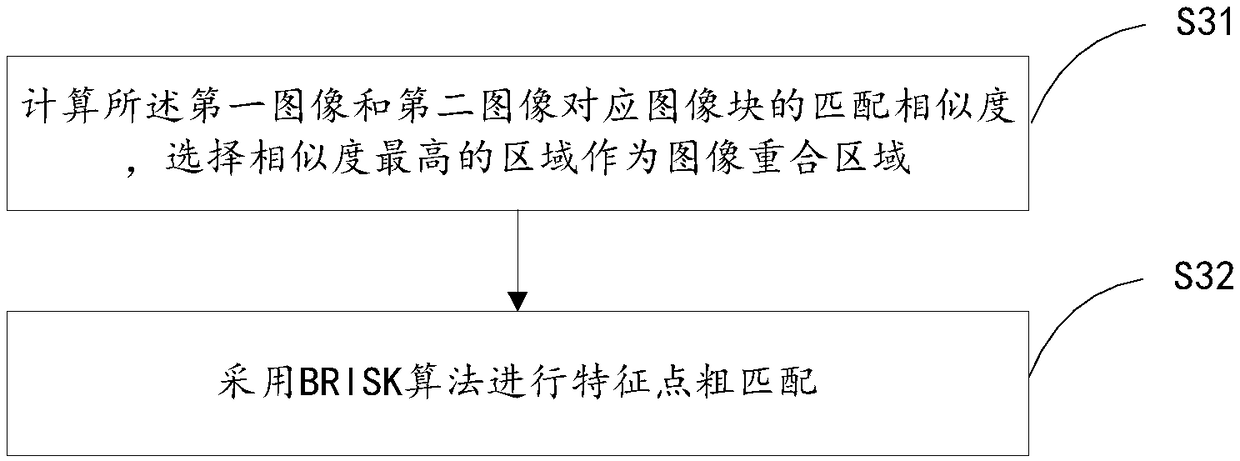
[0057] S30. Perform rough matching on the feature point pairs of the first image and the second image;
[0058] S40. Using an edge detection algorithm to perform edge detection;
[0059] S50. Removing mismatched feature point pairs;
[0060] S60. Stitch the first image and the second image by adopting a gradual-in-and-out fusion mechanism.
[0061] In this embodiment, the extracted image features are matched to estimate the transformation matrix between images, and then the transformation matrix is used to align the images, which effectively eliminates the "ghost" phenomenon of the image, improves the matching speed and splicing speed, and improves In order to improve the...
Embodiment 2
[0083] like Figure 5 Shown, in this embodiment, a kind of image mosaic device based on drone, comprises:
[0084] An image acquisition module 10, configured to acquire an image to be spliced, the image to be spliced includes a first image and a second image;
[0085] Feature point extraction module 20, for extracting the feature points of the image to be stitched;
[0086] A matching module 30, configured to roughly match the feature point pairs of the first image and the second image;
[0087] Edge detection module 40, for adopting edge detection algorithm to carry out edge detection;
[0088] Removal module 50, is used for removing the characteristic point pair of mismatch;
[0089] The splicing module 60 is configured to splice the first image and the second image by adopting an in-and-out fusion mechanism.
[0090] In this embodiment, the extracted image features are matched to estimate the transformation matrix between images, and then the transformation matrix is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More