An overtaking control method and system for an unmanned vehicle
A technology of unmanned vehicles and control methods, applied in the field of unmanned driving, which can solve problems such as collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The application will be described in detail below in conjunction with the accompanying drawings.
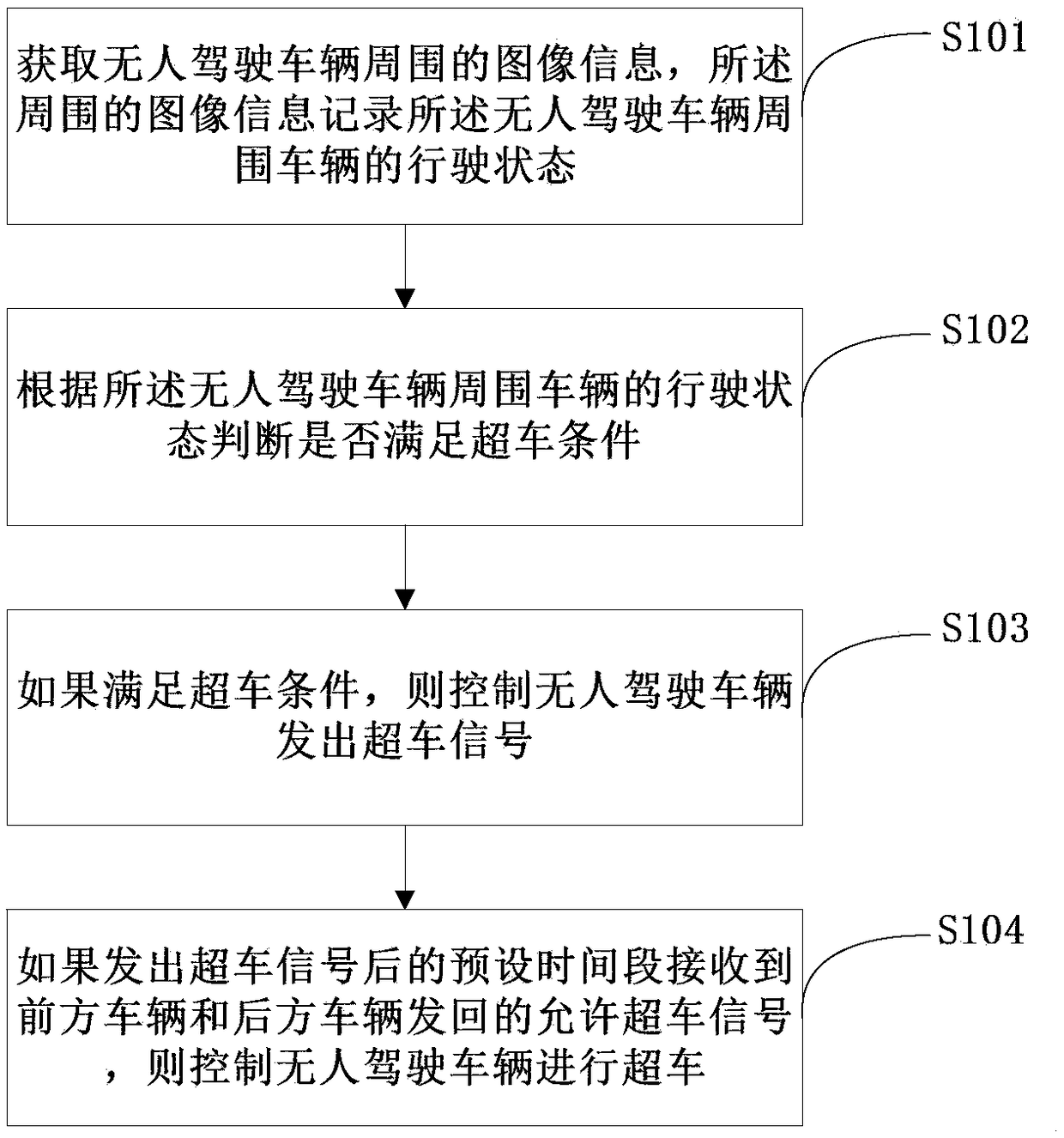
[0022] Such as figure 1 As shown, it is a schematic flow chart of an unmanned vehicle overtaking control method provided by the present application, see figure 1 , the method includes:
[0023] S101. Acquiring image information around the unmanned vehicle, where the surrounding image information records the driving status of vehicles around the unmanned vehicle.
[0024] In the embodiment of the present application, high-precision cameras, position sensors and range finders are installed around the body of the unmanned vehicle. The high-precision camera acquires images around the unmanned vehicle at a high-frequency shooting speed. Vehicle and road condition information around the driving vehicle. The position sensor can accurately know the position of objects around the unmanned vehicle, including vehicles or road facilities around the unmanned vehicle. The range find...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap