

Obstacle avoidance method for automatic parking path planning and parking path planning system
A path planning and automatic parking technology, applied in the field of parking path planning, can solve problems such as large errors, decreased calculation speed, and increased difficulty of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] An embodiment of the present invention provides an obstacle avoidance method for automatic parking path planning, such as Figure 4 shown, including the following steps:
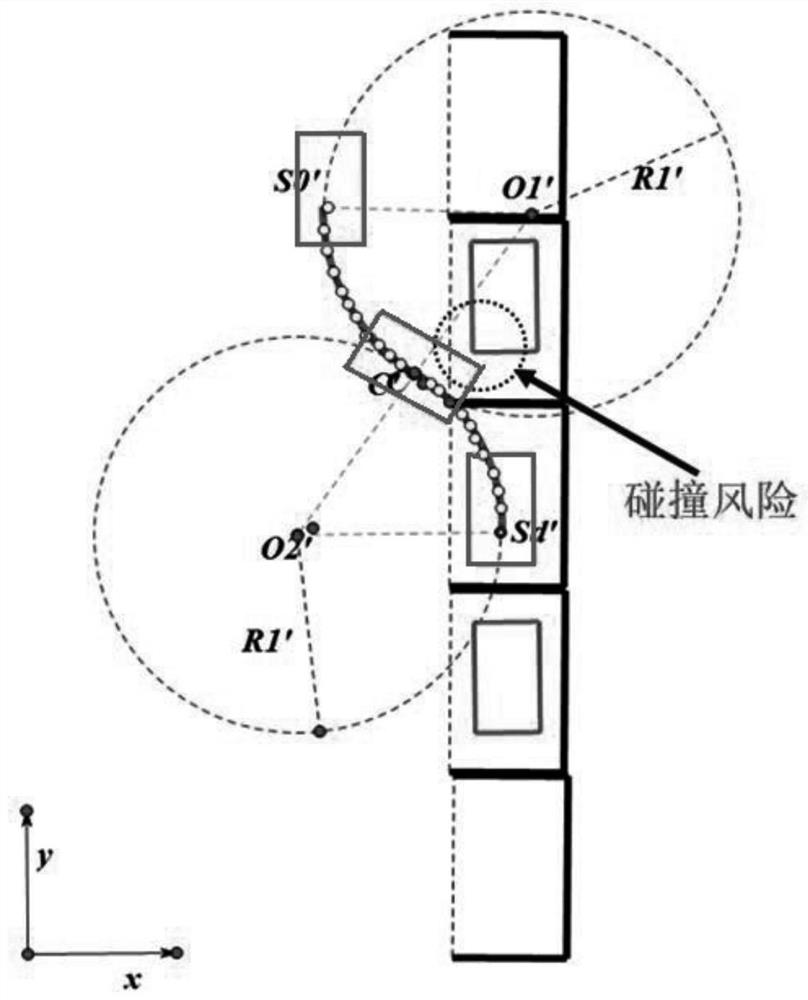
[0039] 101. Planning the parking path trajectory according to the initial vehicle position, parking space and obstacle information.
[0040] The planning process of the parking path trajectory is based on the midpoint of the rear axle of the vehicle as the center of mass (refer to the Ackermann steering principle), and the curve or straight line drawn by the path passed by the center of mass point is used as the parking path trajectory.
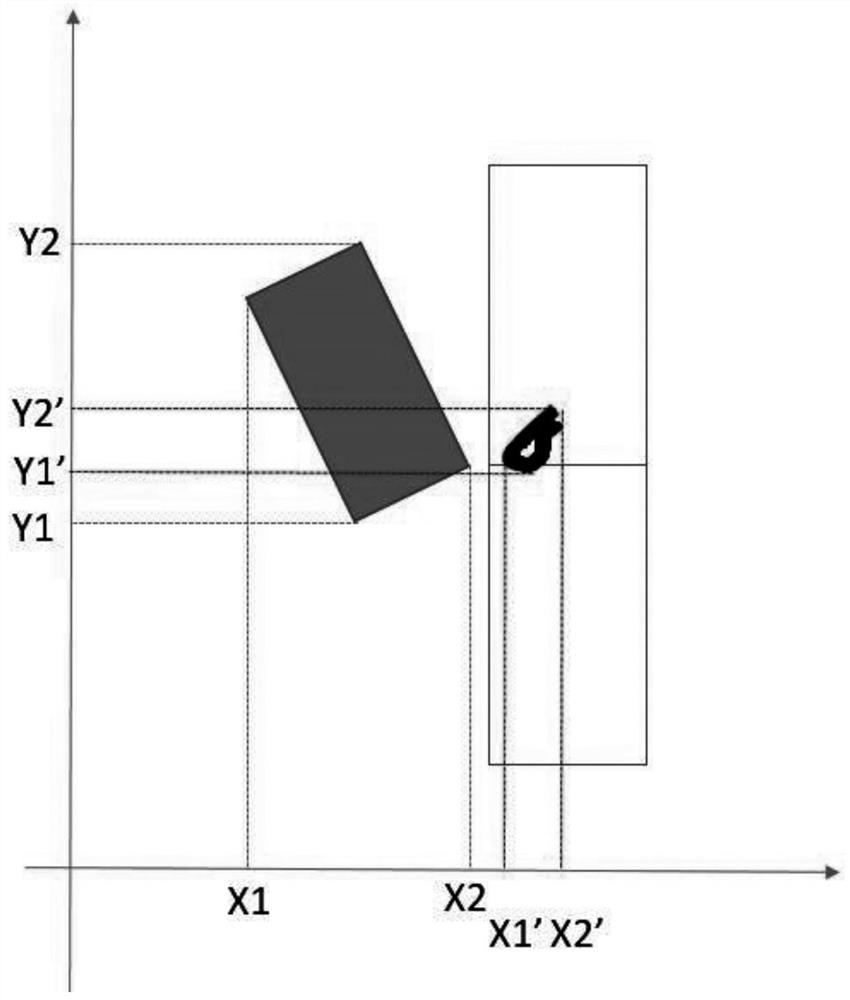
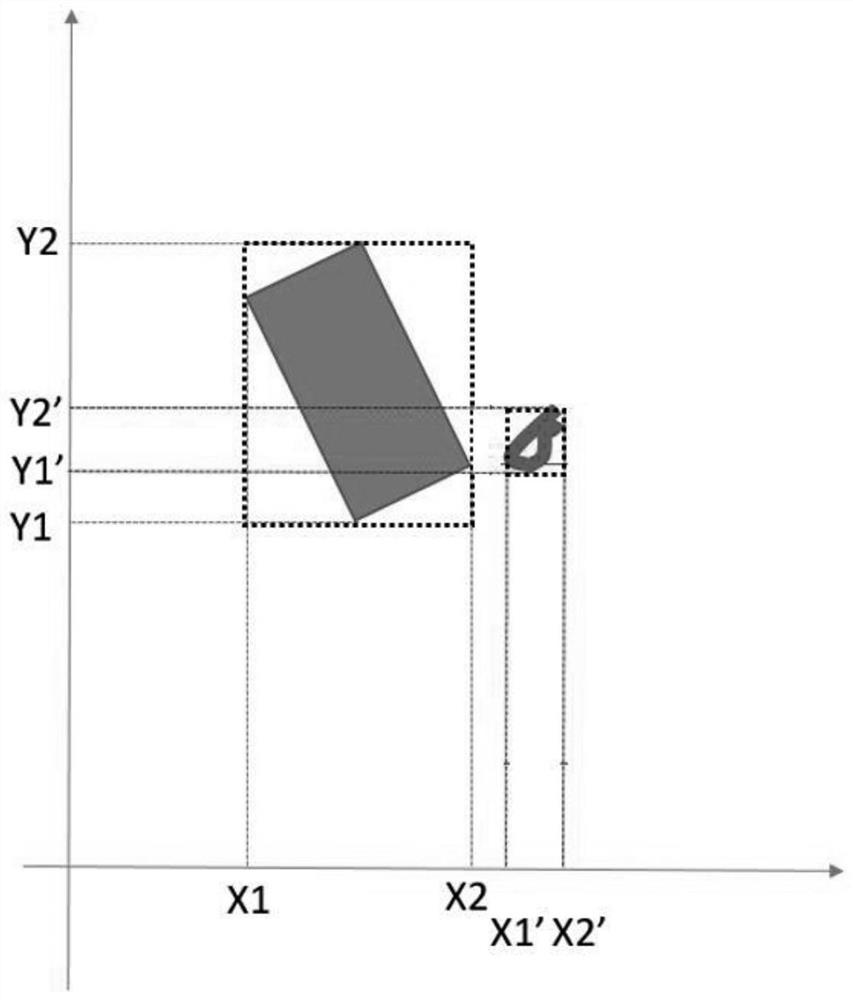
[0041] In this embodiment, the obstacle information includes the obstacle position and the obstacle size, and the obstacle information is mainly acquired through the vehicle camera and the vehicle radar. The reason why the vehicle-mounted camera and vehicle-mounted radar are used to cooperate with each other to obtain obstacle information is because neither a single...
Embodiment 2
[0052] This embodiment discloses a parking path planning system, which is used to implement the obstacle avoidance method for automatic parking path planning mentioned in Embodiment 1. Such as Figure 5 As shown, the parking route planning system 1 includes a vehicle positioning module 6 , a parking space detection module 5 , an obstacle detection module 4 , a calculation module 3 and an interference detection module 2 . The vehicle positioning module 6 is used to obtain the position and posture of the vehicle. The parking space detection module 5 is used to acquire the pose of the parking space. The obstacle detection module 4 includes a vehicle-mounted camera and a vehicle-mounted radar for obtaining obstacle information. The calculation module 3 is used to plan the parking path in combination with the vehicle position, posture, obstacle information and parking position, obtain the trajectory of the parking path and determine the posture of each node on the trajectory of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More