

Full-coverage path planning method of mobile robot
A mobile robot and path planning technology, applied in two-dimensional position/channel control, navigation calculation tools, etc., can solve problems such as unsatisfactory effect, inability to repeat coverage, and inability to achieve unknown map environment coverage, etc., to achieve good coverage effect Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the purpose, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific examples described here are only used to explain the present invention and are not intended to limit the present invention. .
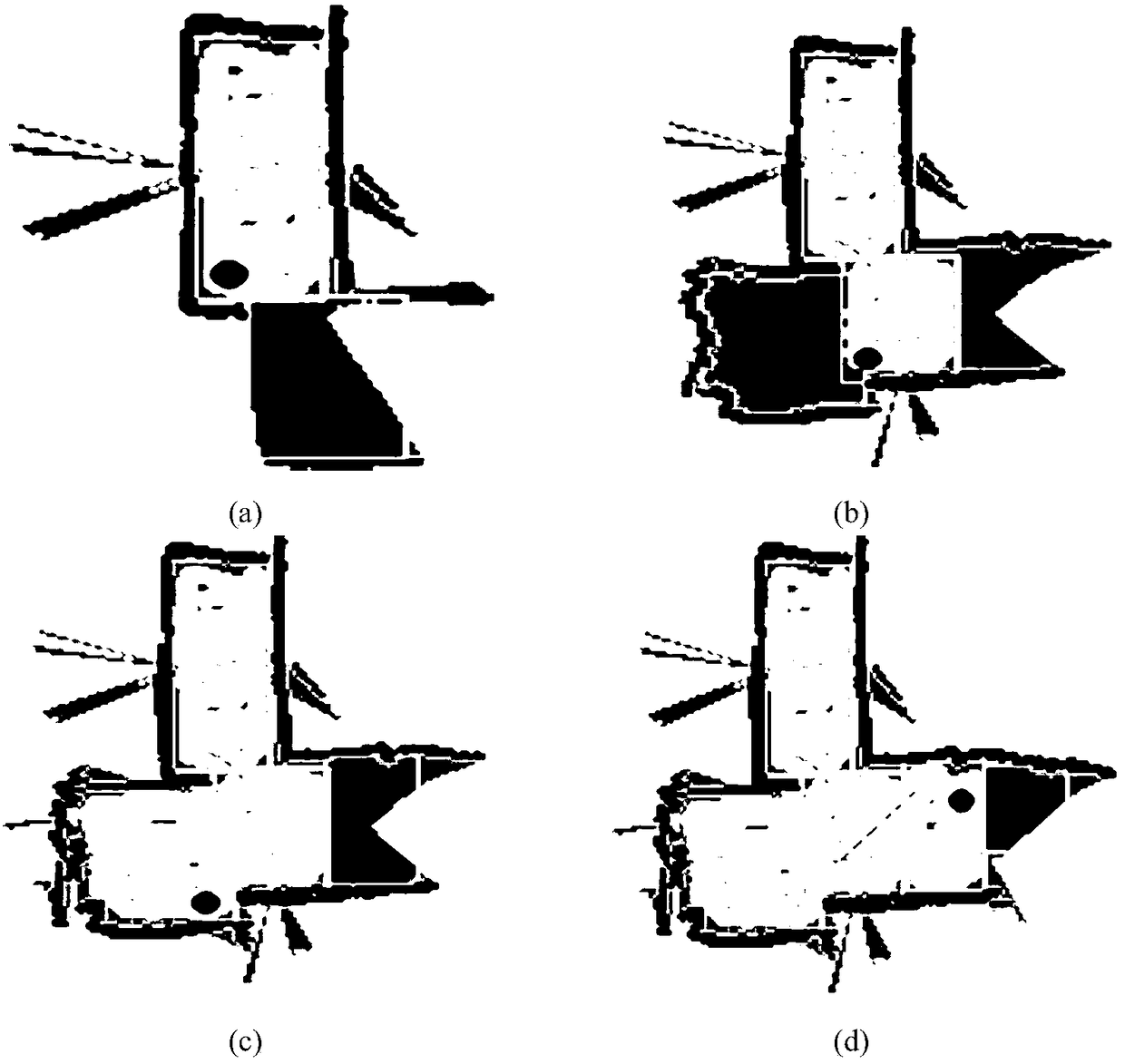
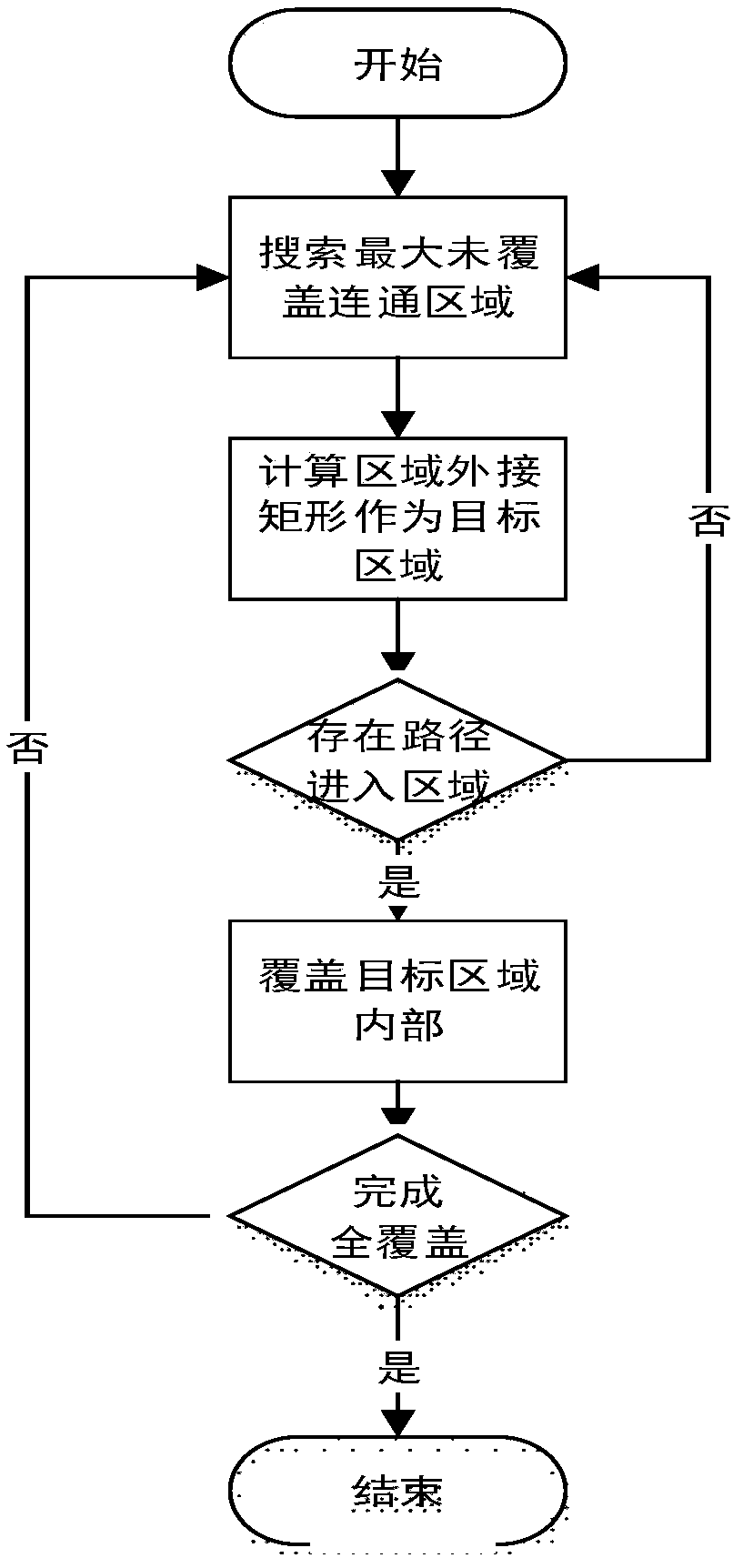
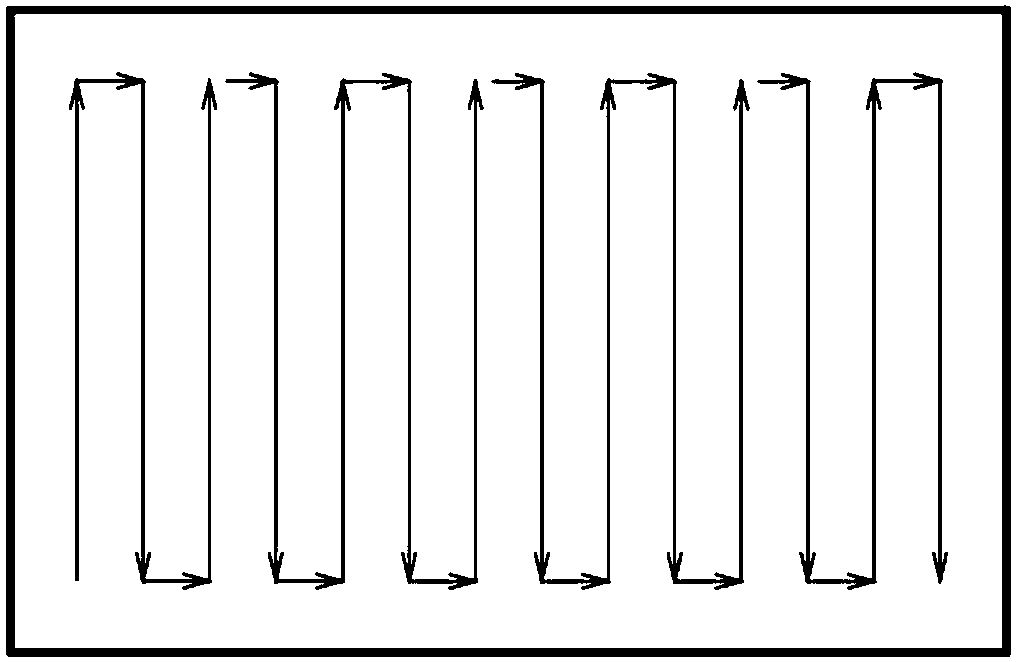
[0061] The present invention is a full-coverage path planning method for a mobile robot. The method is inspired by the cattle plowing segmentation algorithm, and is a new coverage algorithm realized by solving the problem of optimal segmentation coverage and path planning in this process. It mainly includes the following seven steps : Initialize the position of the robot, determine the maximum connected area, cover the area covered by cattle plowing, construct the backtracking list, find the optimal backtracking point, A* path planning, and A* path smoothing. The workflow is as follows Figure 7 shown. The sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More