

Intelligent cleaning robot and its cleaning method based on advanced path planning technology
A cleaning robot and path planning technology, which is applied in the field of smart cars, can solve the problems of missed and repeated cleaning of rooms and corners, long cleaning time, and low coverage of cleaning areas, so as to save cleaning time, avoid repeated cleaning, and improve cleaning. efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be described in further detail below in conjunction with the accompanying drawings.
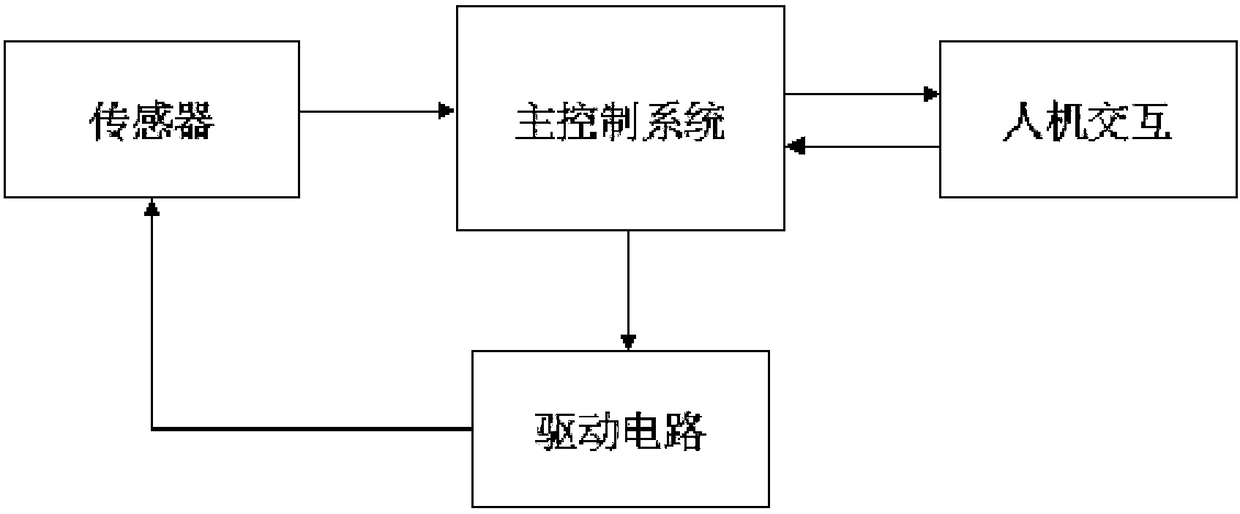
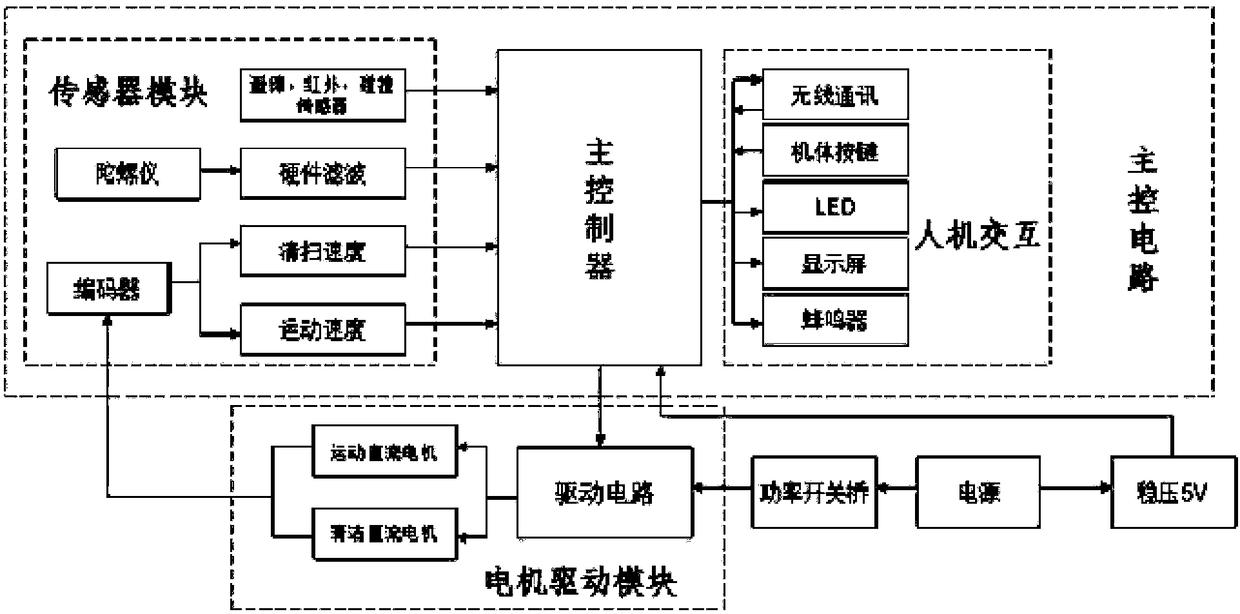
[0060] figure 1 As the general block diagram of the system, the whole system is divided into 4 main parts: the sensor part, the control part, the human-computer interaction part and the motor drive part. The main control system in the control section controls the two first brushless DC motors for movement and the two second brushless DC motors for cleaning of the intelligent cleaning robot, and uses multi-sensor information fusion technology to continuously adjust the intelligent cleaning robot The operating mode and driving speed of the intelligent cleaning robot can be adjusted and controlled in real time. The display of the working status and performance of the intelligent cleaning robot can be realized through the human-computer interaction module, and the remote control and reservation functions of the intelligent cleaning robot can be completed through...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More