

Unmanned transporting system based on machine vision
A technology of machine vision and bit computer, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as laying and maintenance troubles, increase the cost of the transportation system, and waste human resources, so as to reduce the release of productivity and reduce human resources. The effect of investment and cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
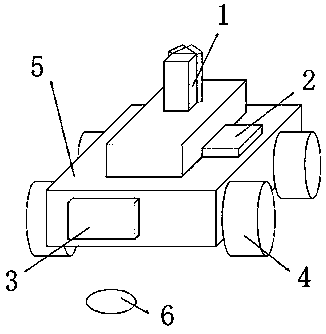
[0016] Example figure 1 As shown, the machine vision-based unmanned transport system of the present invention includes a motion mechanism 4 and a load mechanism 5, and the motion mechanism 4 and the load mechanism 5 are connected by mechanical components, and also include a host computer 2 and a lower computer 3 , the camera assembly 1 and the marker 6, the upper computer 2, the lower computer 3 and the camera assembly 1 are respectively arranged on the loading mechanism 5, and the marker 6 is arranged on each target location where the movement mechanism 4 needs to arrive , the camera component 1 acquires the orientation and distance information of the marker 6 and transmits it to the host computer 2, and the host computer 2 performs machine vision calculation on the information acquired by the camera component 1 and plans a movement path, so The upper computer 2 transmits the planned movement path to the lower computer 3, and the lower computer 3 instructs the movement mechan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More