

A software self-locking manipulator
A manipulator and self-locking technology, applied in the field of manipulators, can solve the problems of unstable grasping, different external curves of the tank, insufficient strength, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
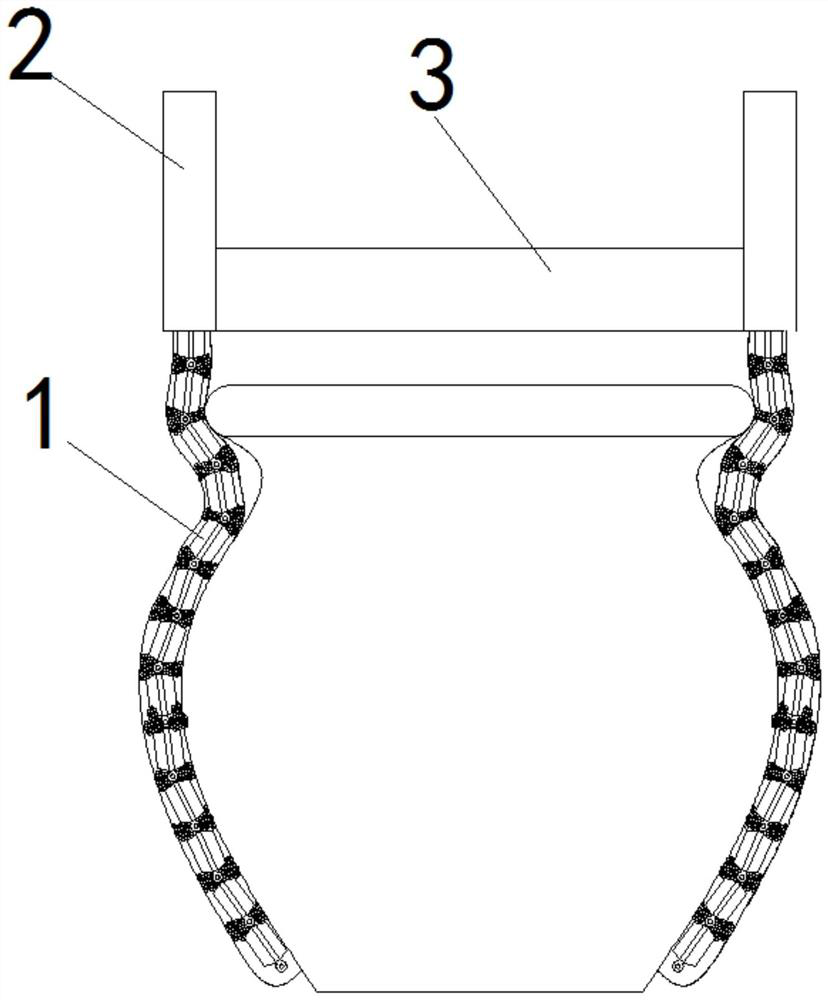
[0044] combine figure 1 As shown, a software self-locking manipulator disclosed in this embodiment includes: a manipulator joint 1, a joint accommodation bin 2, and a base 3. The base 3 is provided with several slideways, and several slideways are based on The center of the seat 3 is set as the center of the circle along the radially equally divided circle, and each of the slides is provided with a joint accommodation bin 2, and a plurality of manipulator joints 1 are arranged in the joint accommodation bin 2, and several manipulator joints 1 are hinged head to tail in sequence The connection forms a joint chain; the base 3 is used as the connection between the support and the lifting structure, and the position of the joint chain is adjusted through the joint accommodation chamber 2 on the base 3 to adapt to pottery pots of different shapes and sizes. to crawl;
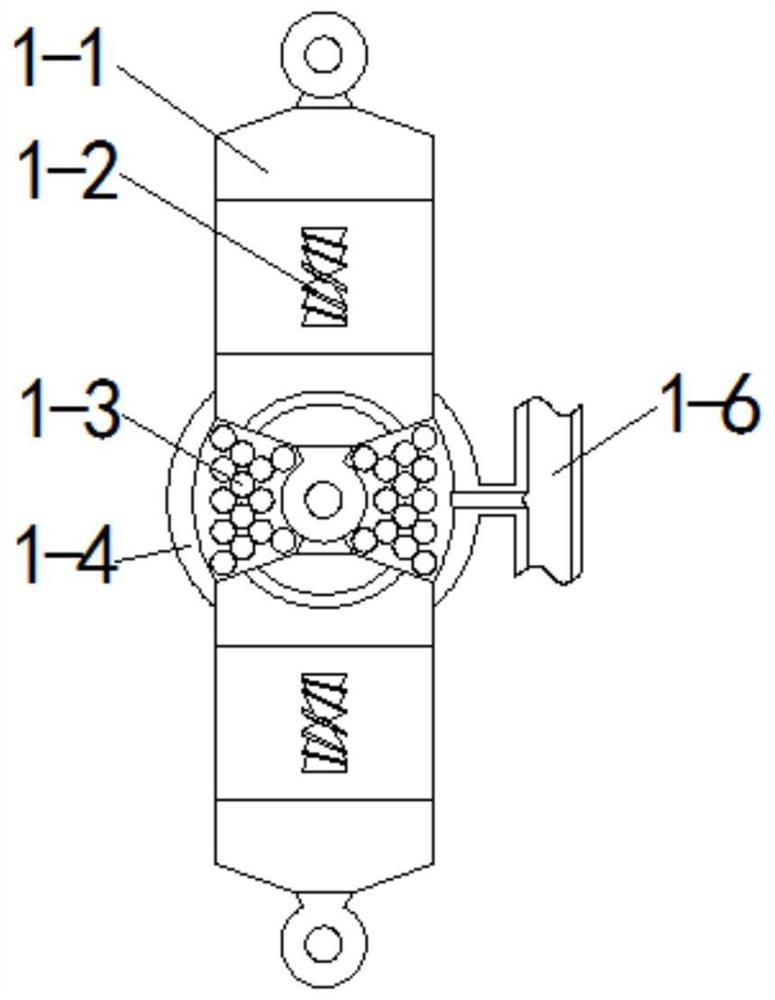
[0045] combine figure 2 As shown, the manipulator joint includes: a joint body 1-1, a fitting device 1-2, a fil...
specific Embodiment approach 2
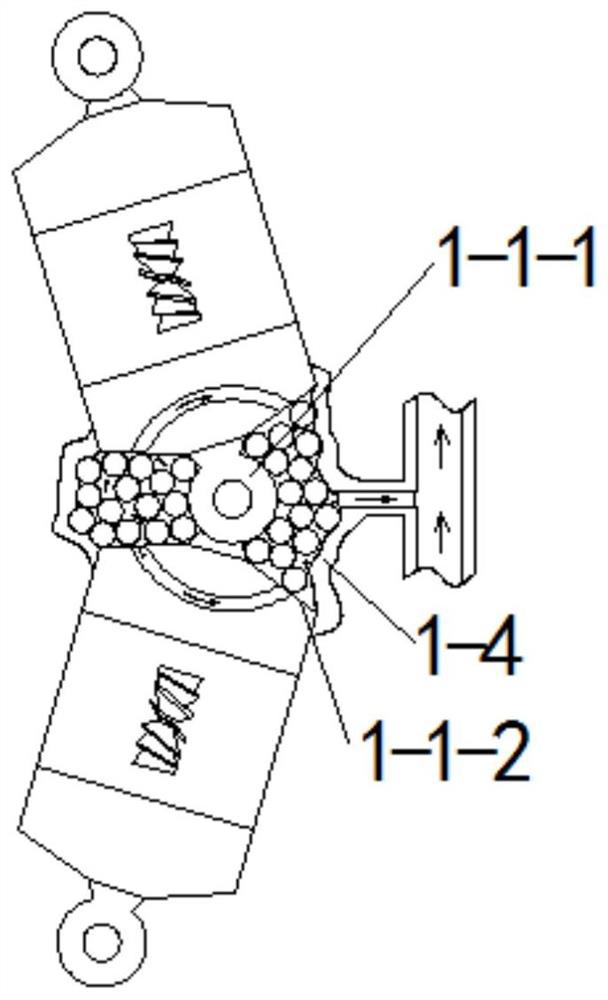
[0051] This embodiment is based on Embodiment 1. Specifically, the inner side of the cladding layer 1-4 is provided with a protruding end extending toward the hinge of the joint body 1-1. -4 when the filler 1-3 is squeezed, the protruding end pushes the filler 1-3 toward the pressure surfaces 1-1-2 on both sides.
specific Embodiment approach 3
[0053] This embodiment is based on the specific implementation mode 1 or 2. Specifically, the fillers 1-3 are several spherical fillers, and the spherical fillers are provided with through holes for ventilation. The cladding layer 1 The inner side of -4 is provided with a separation layer, the separation layer is a mesh structure, the spherical filling is arranged in the separation layer, and the separation layer covers the filling 1-3 without affecting the air flow. When the vacuum is drawn, the filler 1-3 is moved out of the cavity along with the cladding layer 1-4.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More