Mobile robot positioning method, device and system
A technology of mobile robot and positioning method, which is applied in the direction of navigation computing tools, etc., which can solve the problems of increased decoding complexity and cost, high precision requirements for two-dimensional code production, low decoding success rate, etc., and achieves easy recognition and strong anti-distortion ability , Improve the decoding speed and decoding success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
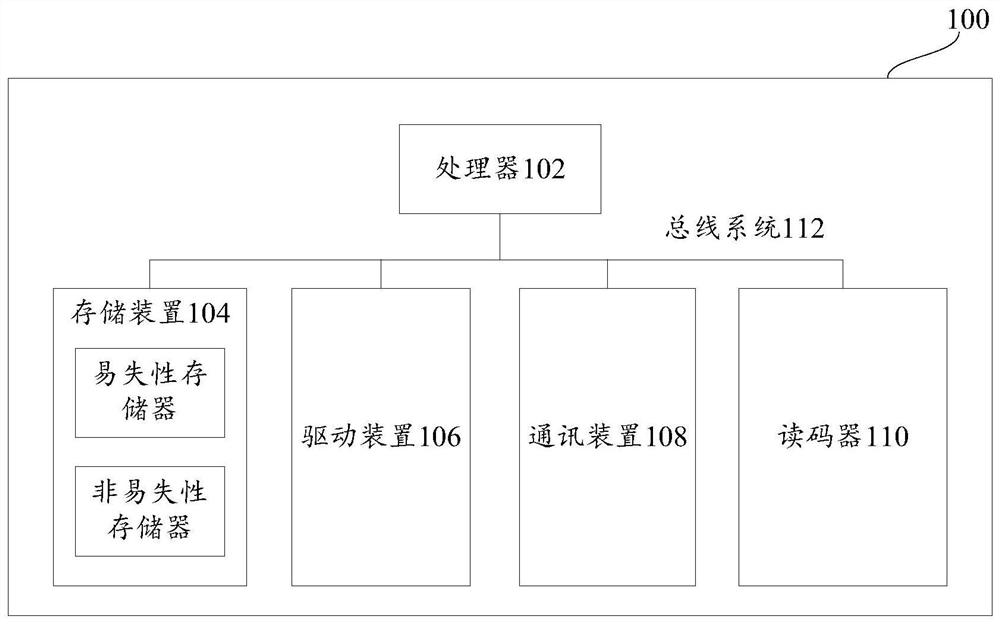
[0065] First, refer to figure 2 An example mobile robot 100 for implementing the mobile robot positioning method of the embodiment of the present invention will be described. The mobile robot 100 may be, but not limited to, an AGV (Automated Guided Vehicle, automatic guided vehicle) used in an automated assembly line system.
[0066] Such as figure 2 As shown, the mobile robot 100 includes one or more processors 102, one or more storage devices 104, a drive device 106, a communication device 108, and a code reader 110. These components are connected through a bus system 112 and / or other forms of connection mechanisms (not shown) interconnects. It should be noted that figure 2 The components and structures of the mobile robot 100 shown are exemplary rather than limiting, and the mobile robot may also have other components and structures as required.
[0067] The processor 102 may be a central processing unit (CPU) or other form of processing unit having data processing c...
Embodiment 2
[0073] This embodiment provides a method for positioning a mobile robot. It should be noted that the steps shown in the flow chart of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and although the steps shown in the flow chart A logical order is shown, but in some cases the steps shown or described may be performed in an order different from that presented here. This embodiment will be described in detail below.
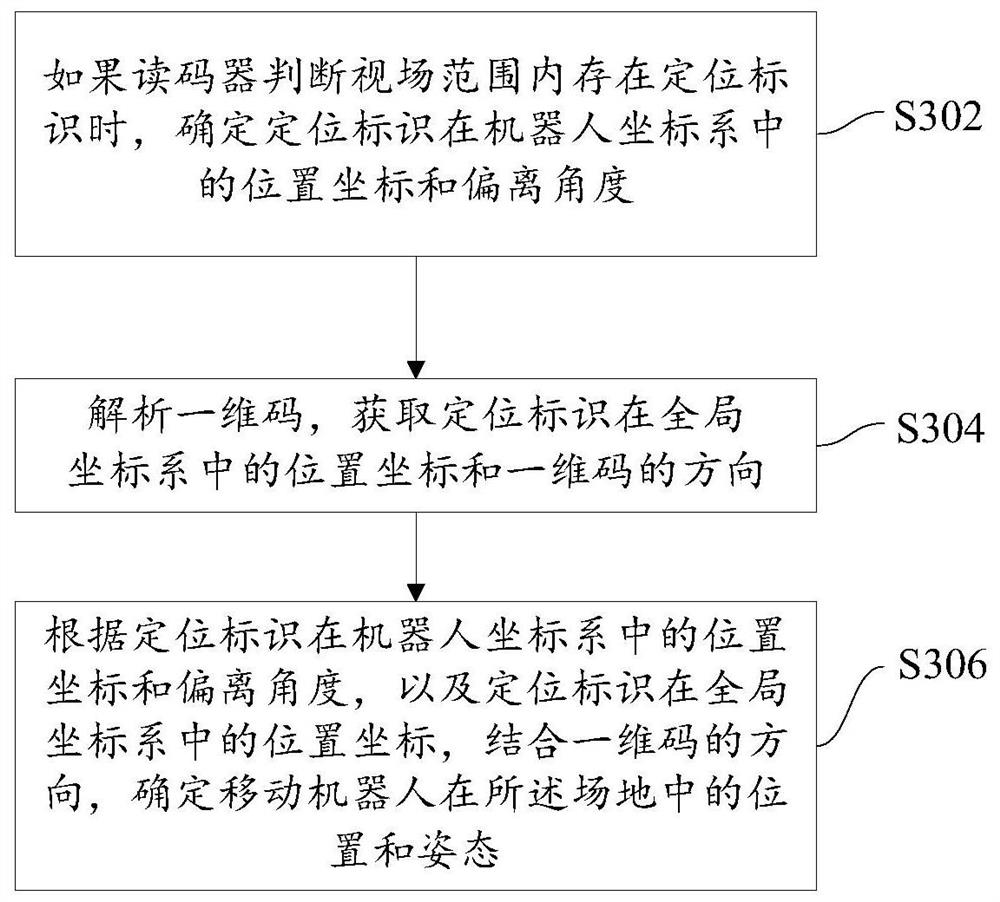
[0074] image 3 shows a flow chart of a mobile robot positioning method provided by an embodiment of the present invention, as shown in image 3 As shown, the method includes the following steps:
[0075] Step S302, if the code reader determines that there is a positioning mark within the field of view, determine the position coordinates and deviation angle of the positioning mark in the robot coordinate system.
[0076] Wherein, the positioning mark is arranged in the field where the mobile robot...
Embodiment 3
[0122] Corresponding to the mobile robot positioning method provided in the second embodiment, this embodiment provides a mobile robot positioning device, which is applied to a code reader on the mobile robot. Figure 9 A schematic structural diagram of a mobile robot positioning device provided by an embodiment of the present invention is shown, as shown in Figure 9 As shown, the device includes the following modules:
[0123] The scanning module 91 is used to determine the position coordinates and deviation angle of the positioning mark in the robot coordinate system if the code reader judges that there is a positioning mark in the field of view; the positioning mark is arranged in the field where the mobile robot is active, including directional 1D code.
[0124] The decoding module 92 is configured to analyze the one-dimensional code, and obtain the position coordinates of the positioning mark in the global coordinate system and the direction of the one-dimensional code....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More