

Multi-scale approximate explicit model predictive control method for three-degree-of-freedom helicopter
A technology of model predictive control and helicopter, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as increasing complexity and increasing difficulty in dealing with problems, so as to overcome defects, facilitate online search and online Find handy effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be further described below in conjunction with accompanying drawing:
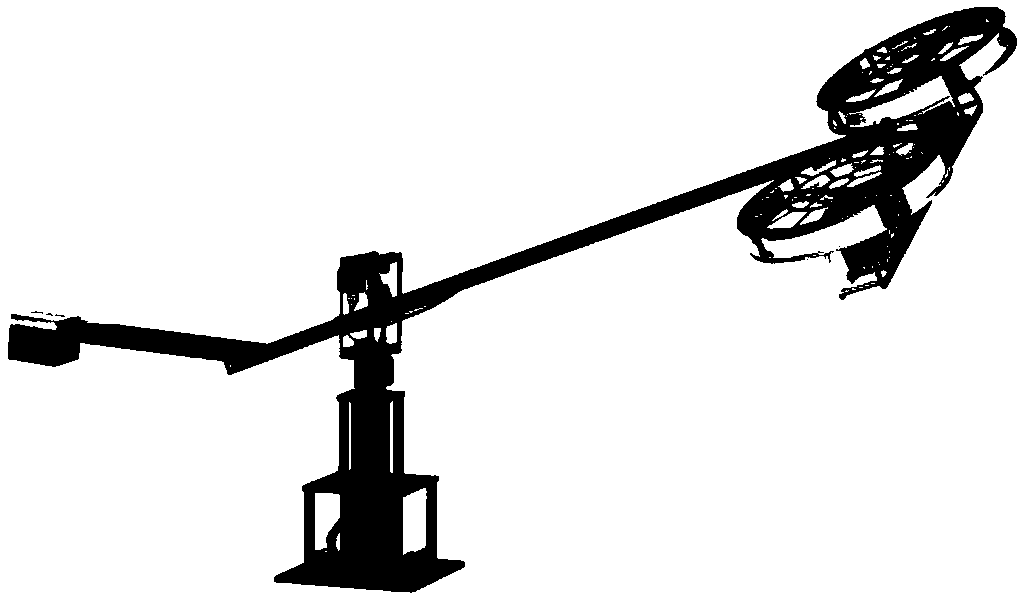
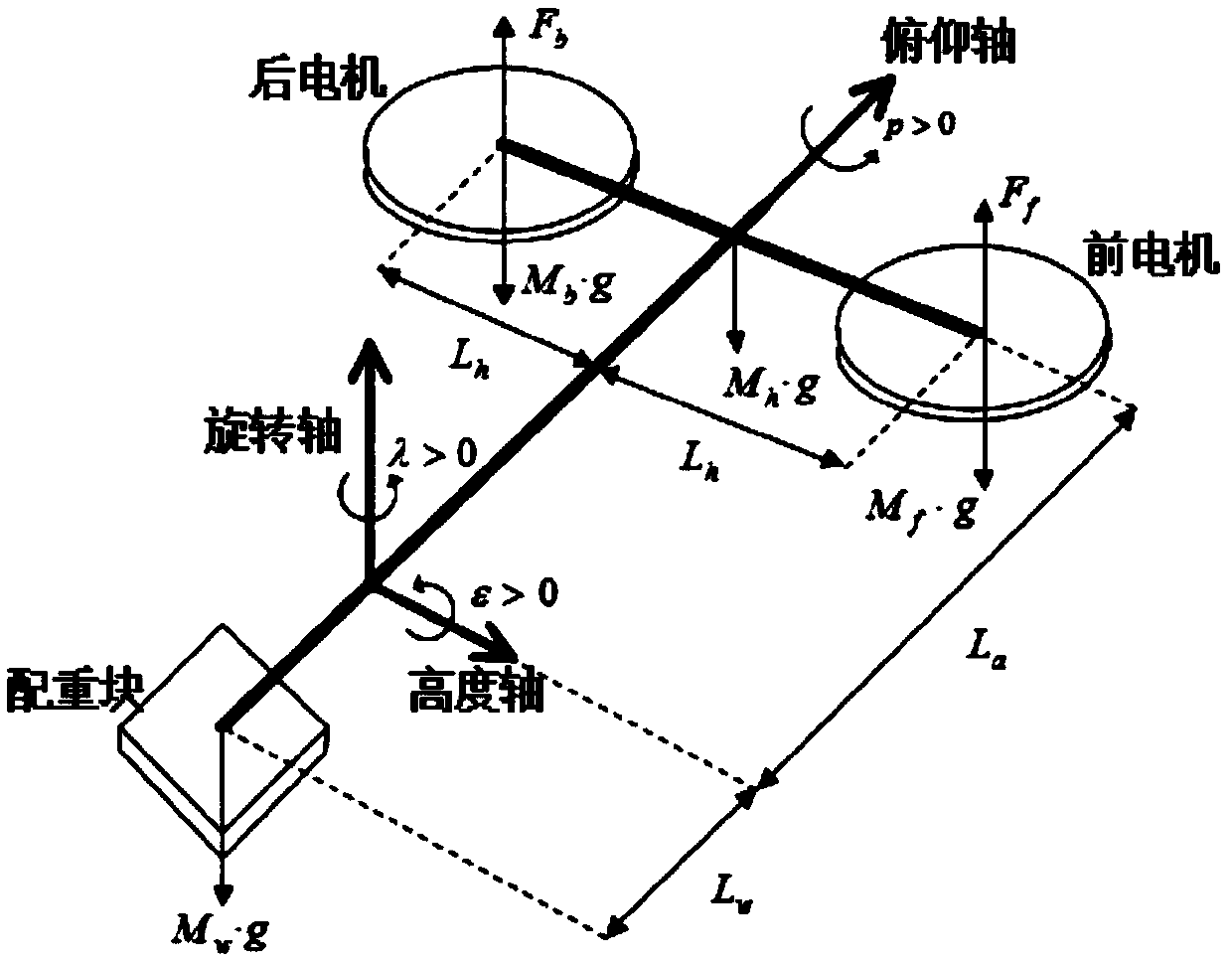
[0069] The three-degree-of-freedom helicopter rapid model predictive control method of the present invention, such as figure 1 Shown is the application object three-degree-of-freedom helicopter model, figure 2 It is a three-degree-of-freedom helicopter system model diagram, and specifically includes the following steps:
[0070] Step 1) modeling the three-degree-of-freedom helicopter system to obtain the three-degree-of-freedom helicopter performance index function;
[0071] The space state equation of the three-degree-of-freedom helicopter system is:
[0072]
[0073] Select altitude angle ε, pitch angle p, rotation angle r, altitude angular velocity Pitch rate and the rotational angular velocity as a state vector, that is The voltage of the front and rear motors is taken as input, that is, u=[V f V b ] T , output y=[ε p r] T . By substituting the param...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More