

Suspension mechanism and mobile robot
A suspension mechanism and robot body technology, which is applied in the field of mobile robots, can solve the problems of weakened driving ability, reduced friction, and the inability of the robot to move forward, so as to improve the ability to overcome obstacles and prolong the life of the motor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
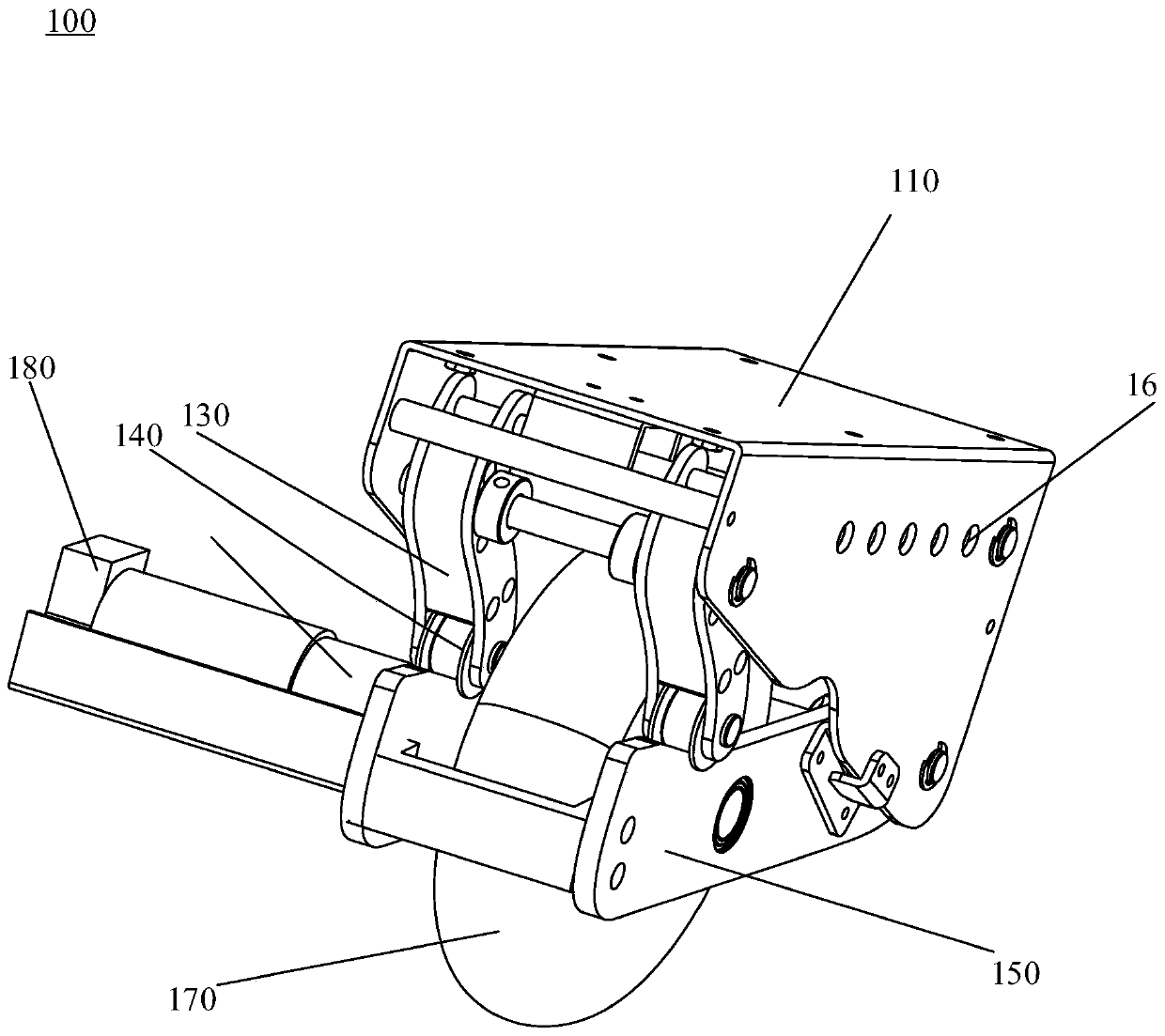
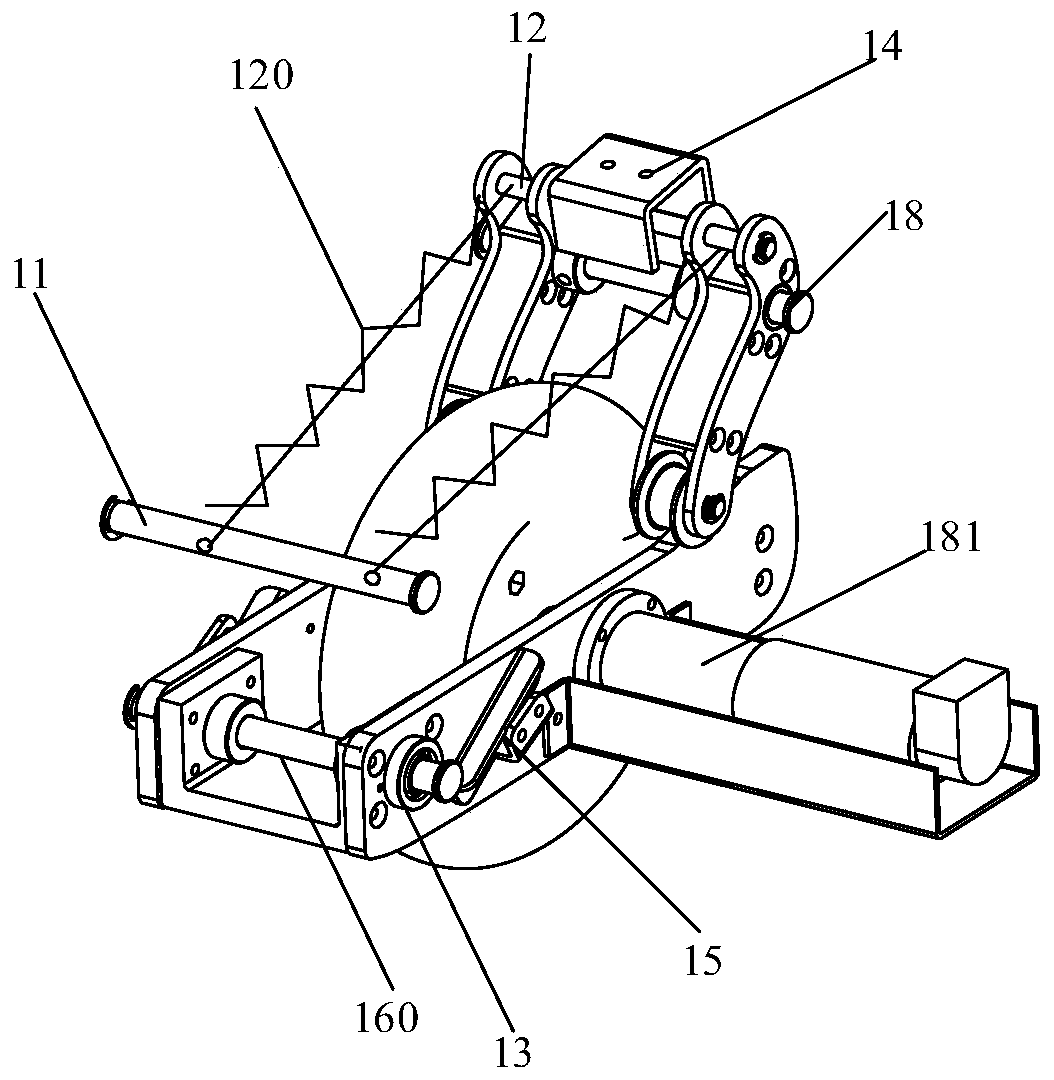
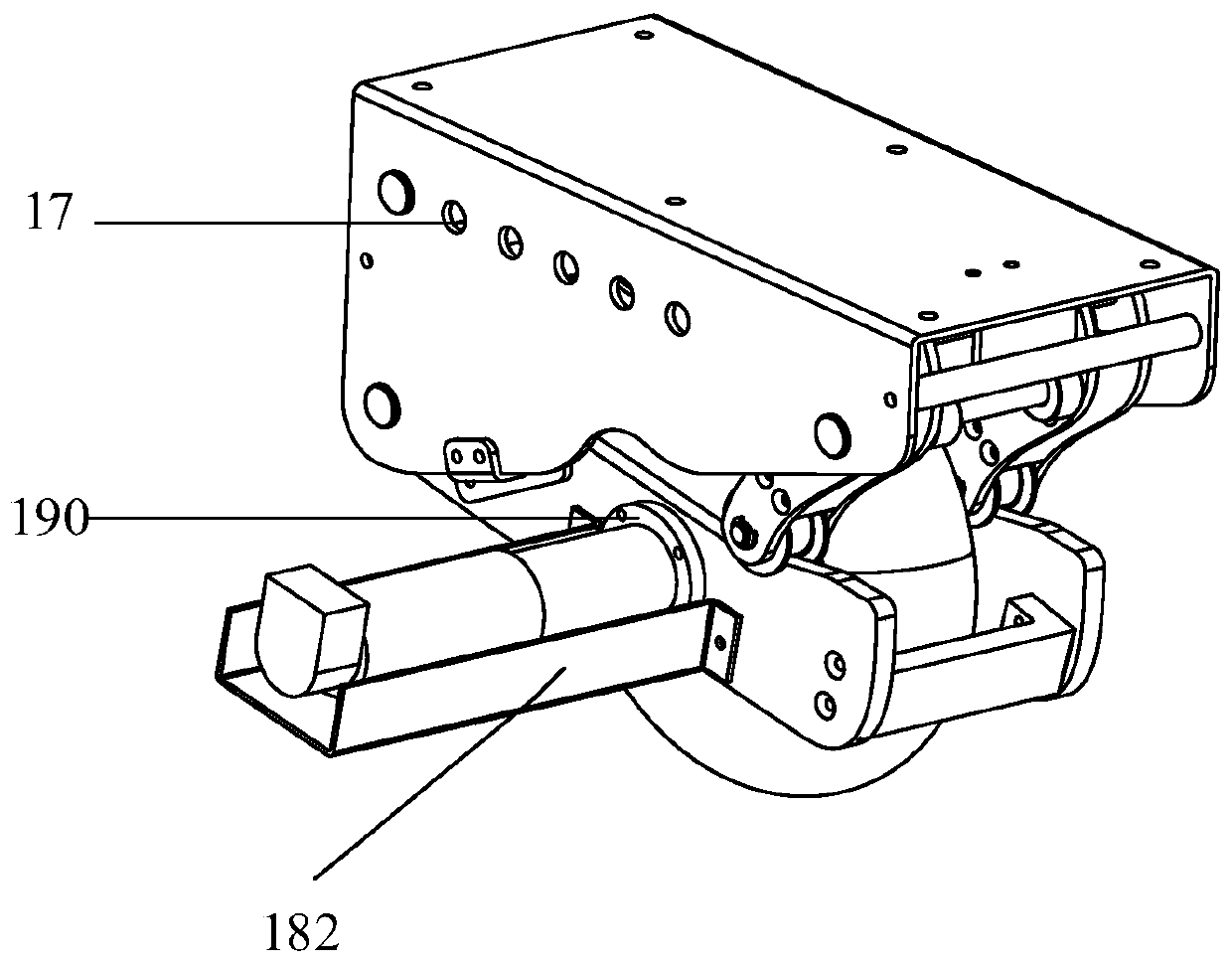
[0039] Please refer to Figure 1 to Figure 3 , the present embodiment provides a suspension mechanism 100, which can convert the pressure or tension generated by the elastic member into the ground pressure on the driving wheel, which increases the grip force of the driving wheel when moving on uneven roads , to ensure its smooth operation.
[0040] The suspension mechanism 100 includes: a housing 110 , an elastic member 120 , a first swing arm 130 , a pulley 140 , a second swing arm 150 , a rotating shaft 160 , a driving wheel 170 , a motor 180 and a connecting piece.
[0041] In an optional implementation manner, the above-mentioned connecting member includes: a flange 190 and bolts.
[0042] One end of the elastic member 120 is connected to the housing 110 , and the other end of the elastic member 120 is movably connected to one end of the first swing arm 130 .
[0043] Specifically, the elastic member 120 is connected to one end of the housing 110 through the fixing rod 1...
no. 2 example
[0089] Such as Figure 8 As shown, this embodiment provides a mobile robot 200, which has better obstacle-surmounting ability and can smoothly pass over ridges and gaps. It includes a robot body 210 and the aforementioned suspension mechanism 100 , and the robot body 210 is installed on the casing 110 of the suspension mechanism 100 .
[0090] It should be noted that the mobile robot 200 provided in this embodiment includes at least two groups of the suspension mechanisms 100 described in the first embodiment, so as to satisfy the condition that the mobile robot 200 can be balanced.
[0091] The suspension mechanism 100 is an integral structure, and the robot body 210 can be directly installed on the suspension mechanism 100 through bolts installed on the housing 110 .
[0092] Further, the robot body 210 uses four universal wheels 211 as shown in the figure as driven wheels, the drive wheel 170 provides power, and the four universal wheels 211 start to move due to friction. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More