

A method and apparatus for rendering a scene in a vehicle autopilot simulator
A technology of automatic driving and simulator, which is applied in the scene field of rendering vehicle automatic driving simulator, can solve the problems of high manpower and material cost, and achieve good debugging and verification effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] A method and device for rendering a scene in a vehicle automatic driving simulator according to an embodiment of the present disclosure will be described below with reference to the accompanying drawings.
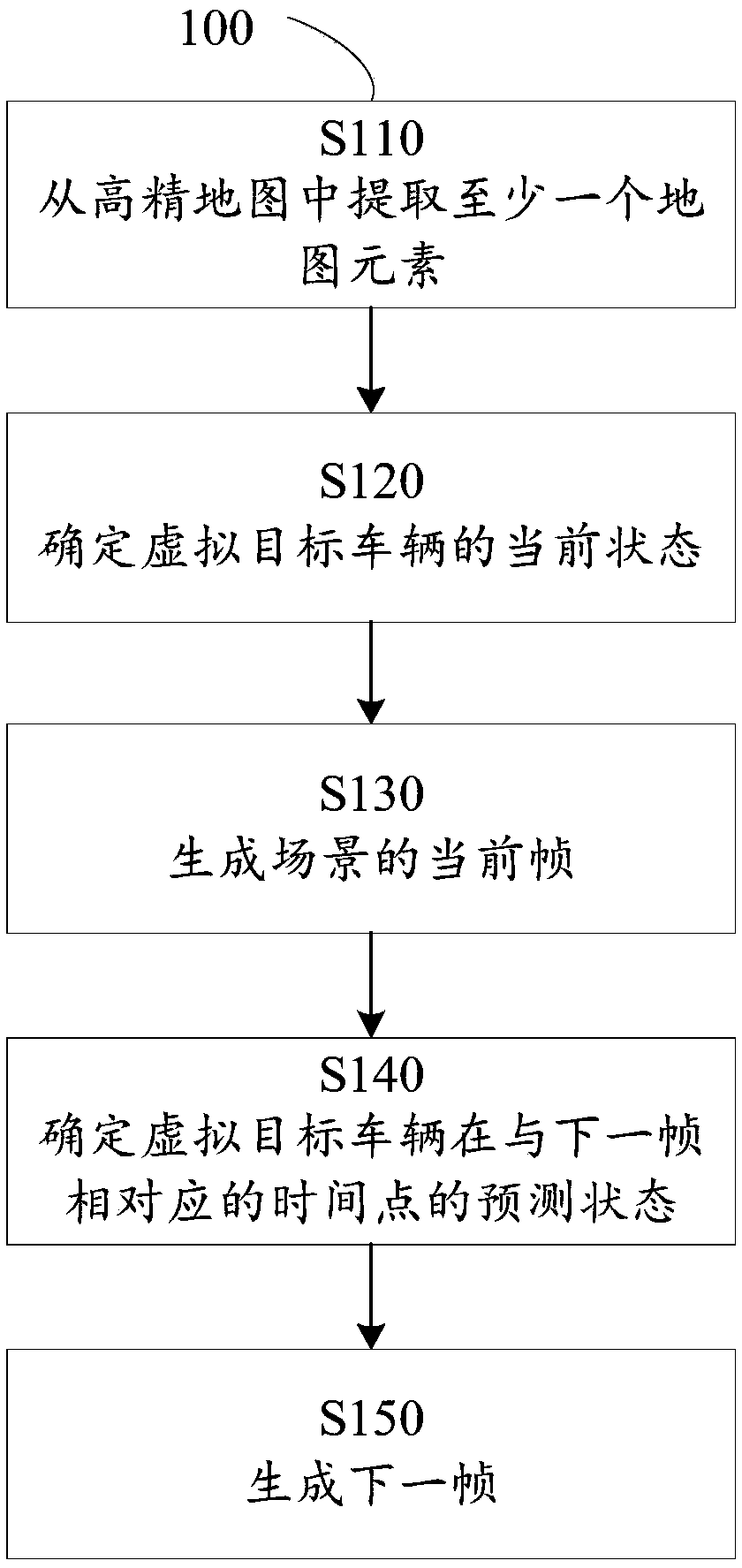
[0015] Such as figure 1 As shown, an example method 100 for rendering a scene in a vehicle automatic driving simulator according to an embodiment of the present disclosure may include:
[0016] Step S110, extracting at least one map element from the high-precision map;
[0017] Step S120, determining the current state of the virtual target vehicle according to the automatic driving scheme used to control the virtual target vehicle to travel in the aforementioned scene;
[0018] Step S130, generating a current frame of the aforementioned scene according to the aforementioned at least one map element and the vehicle rendering parameters corresponding to the aforementioned current state;
[0019] Step S140, determining the predicted state of the aforementioned virtual...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More