

A method, device, electronic equipment and storage medium for unmanned aerial vehicle flight obstacle avoidance
A drone and obstacle technology, applied in the field of drones, can solve the problems of maneuverability and low efficiency of drone obstacle avoidance flight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
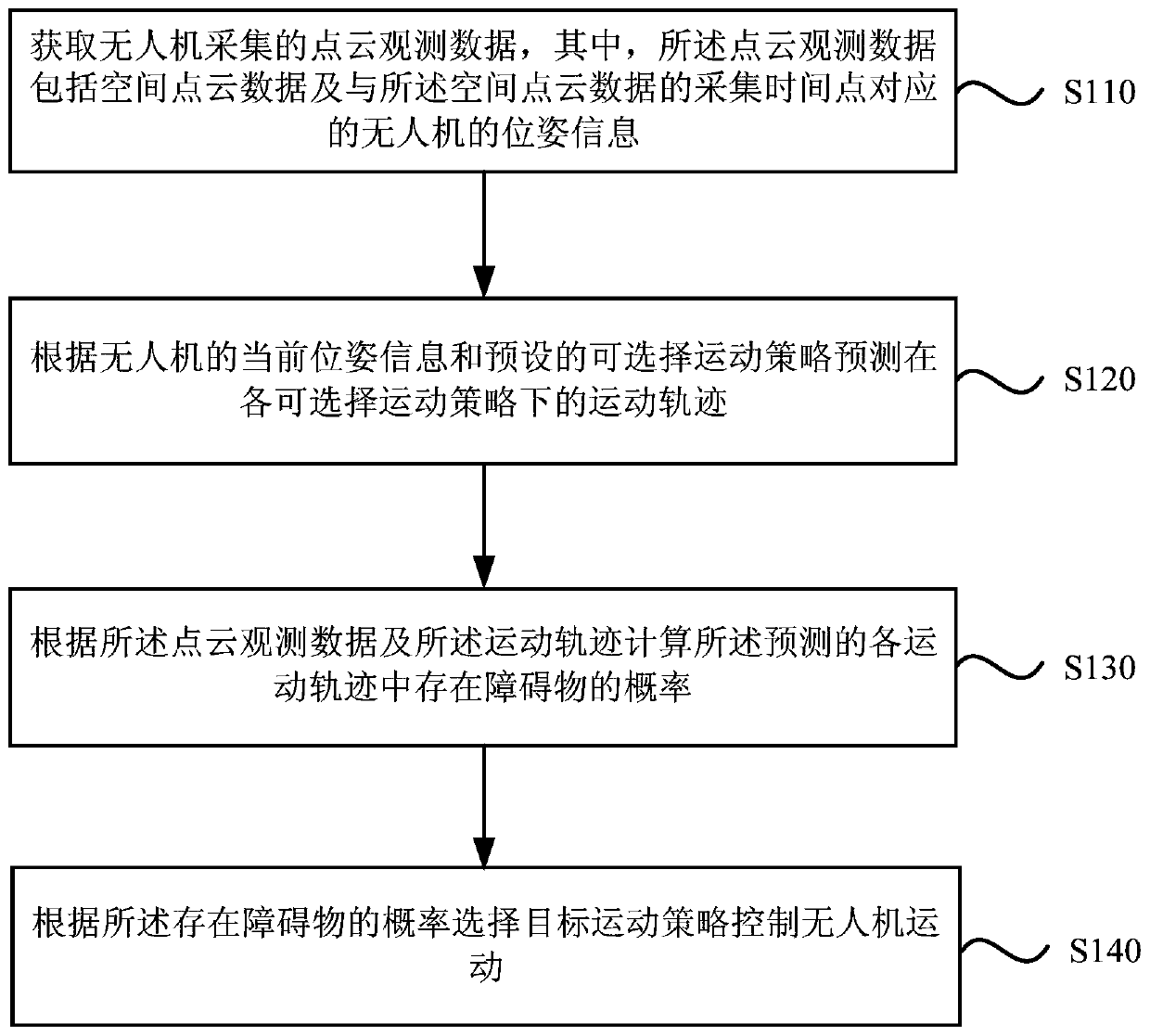
[0027] figure 1 It is a flow chart of a UAV flight obstacle avoidance method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of similar topic recommendation. The method can be executed by a UAV flight obstacle avoidance device, specifically including the following step:
[0028] S110. Obtain point cloud observation data collected by the UAV, wherein the point cloud observation data includes spatial point cloud data and pose information of the UAV corresponding to the collection time point of the spatial point cloud data.
[0029] Among them, the spatial point cloud data can be the object information in the environment during the flight process of the drone collected by the point cloud data acquisition system in the drone, and the point cloud data can specifically be a set of vectors in a three-dimensional coordinate system gather. These vectors are usually expressed in the form of X, Y, and Z three-dimensional coordinates, an...
Embodiment 2
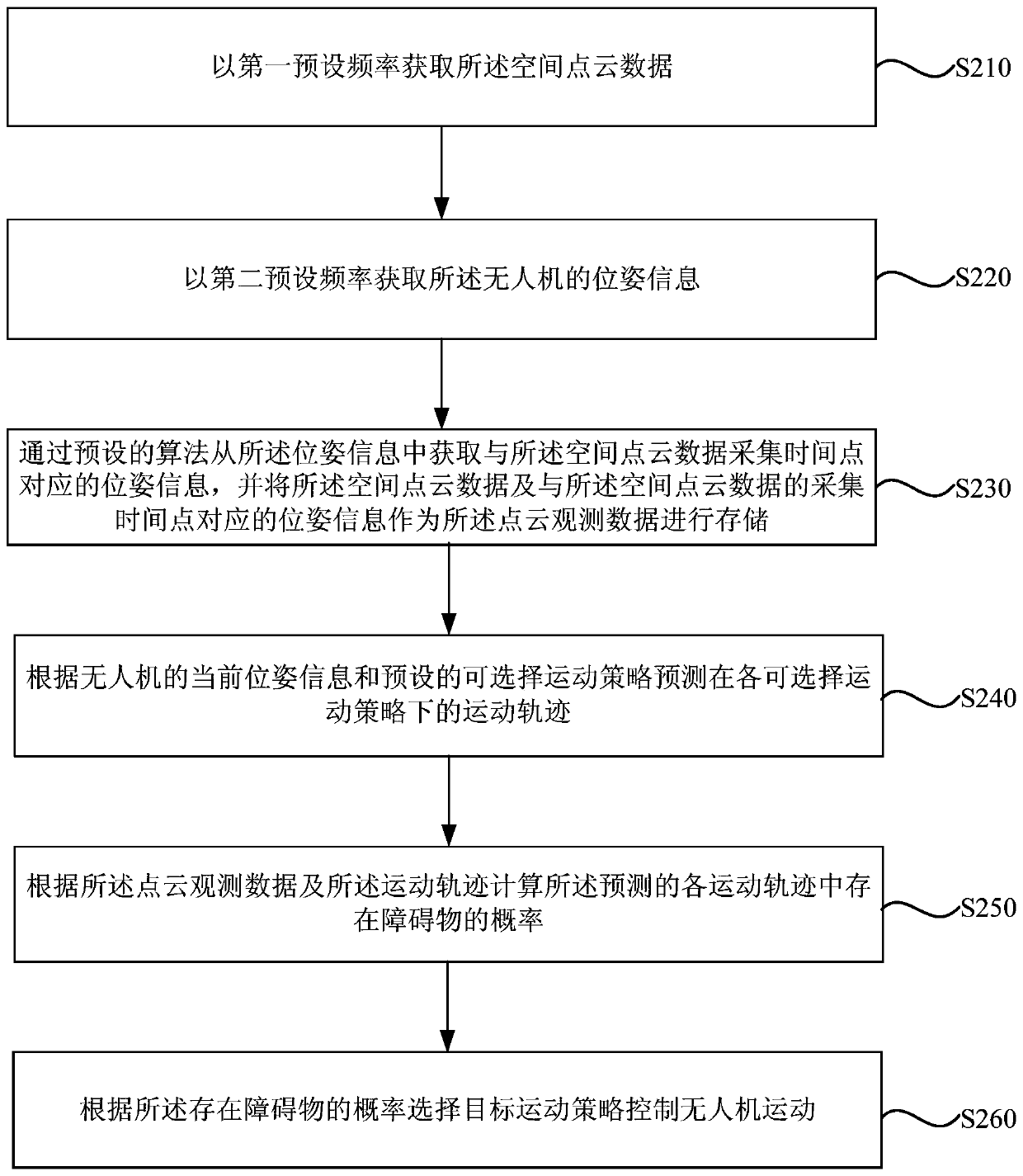
[0047] figure 2 It is a flow chart of a UAV flight obstacle avoidance method provided by Embodiment 2 of the present invention. Exemplarily, if the UAV can include a flight control system, a flight management system and a sensing system. The flight control system can be responsible for the flight control of the UAV and provide the UAV attitude control interface for the flight management system; the sensing system can use a binocular vision system to provide spatial point cloud data; the flight management system can use an embedded computing platform, Use the point cloud data provided by the sensor system and the control interface provided by the flight control system to perform obstacle avoidance flight control. In the specific implementation process, the drone flight obstacle avoidance method provided by this embodiment can be run in the flight tube system. On the basis of the above-mentioned embodiments, the steps of obtaining point cloud observation data are further optim...
Embodiment 3
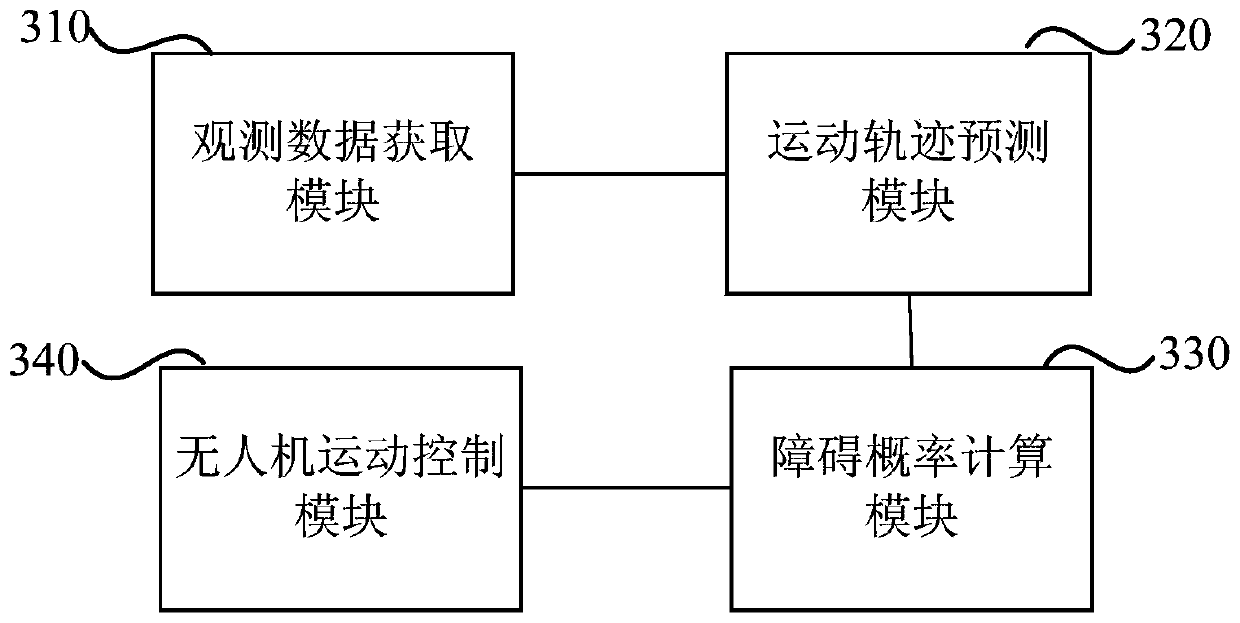
[0083] image 3 A schematic structural diagram of a UAV flight obstacle avoidance device provided in Embodiment 3 of the present invention, as shown in image 3 As shown, the device includes:
[0084] The observation data acquisition module 310 is used to obtain the point cloud observation data collected by the UAV, wherein the point cloud observation data includes space point cloud data and the time point corresponding to the acquisition time of the space point cloud data. Pose information;
[0085] The motion track prediction module 320 is used to predict the motion track under each optional motion strategy according to the current pose information of the drone and the preset optional motion strategy;
[0086] Obstacle probability calculation module 330, configured to calculate the probability of obstacles existing in each of the predicted trajectories according to the point cloud observation data and the trajectories;
[0087] The UAV motion control module 340 is configu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More