Anti-collision method and device for cross operation of interference mechanism
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of cross operation and anti-collision device, which is applied in the directions of manipulators, program-controlled manipulators, two-dimensional position/channel control, etc., can solve problems such as manipulator collisions, and achieve the effect of avoiding damage and preventing collisions.
Active Publication Date: 2020-10-27
SUZHOU JINGLAI OPTO CO LTD
View PDF6 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] In order to overcome the deficiencies of the prior art, the object of the present invention is to provide an interference mechanism cross-operation collision avoidance method and device, aiming at solving the problem of possible collision between manipulators when the interference mechanism cross-operation
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment 1
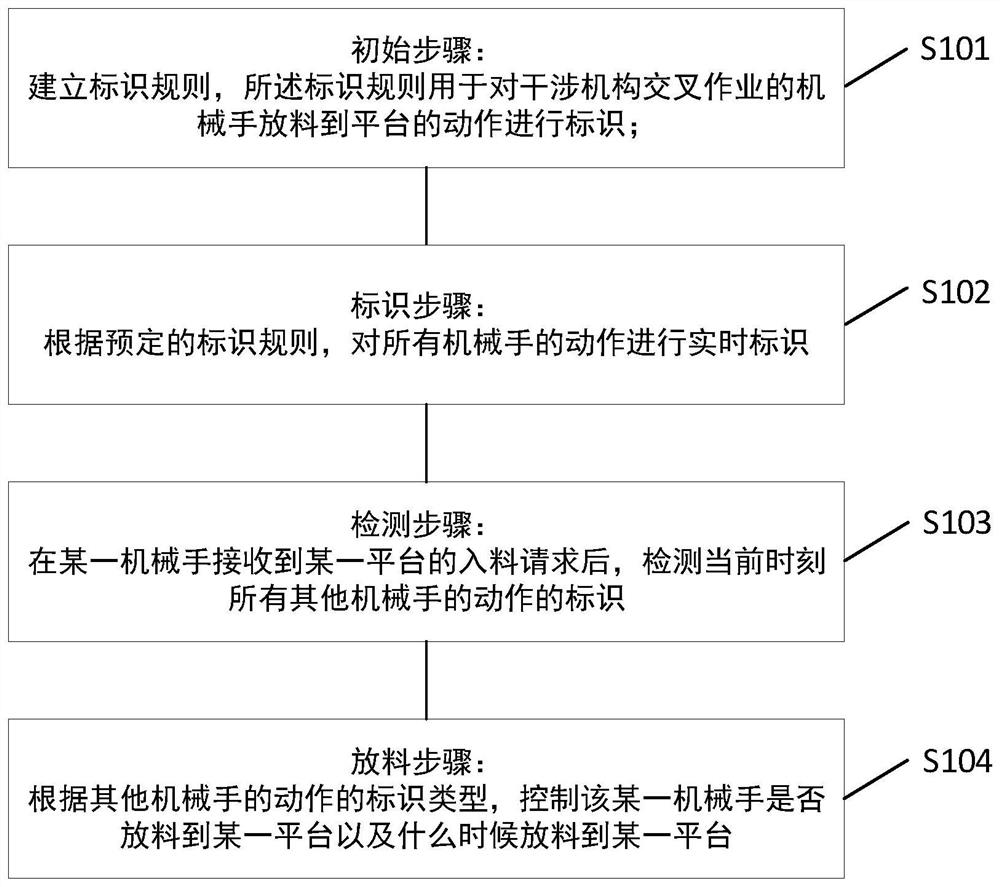
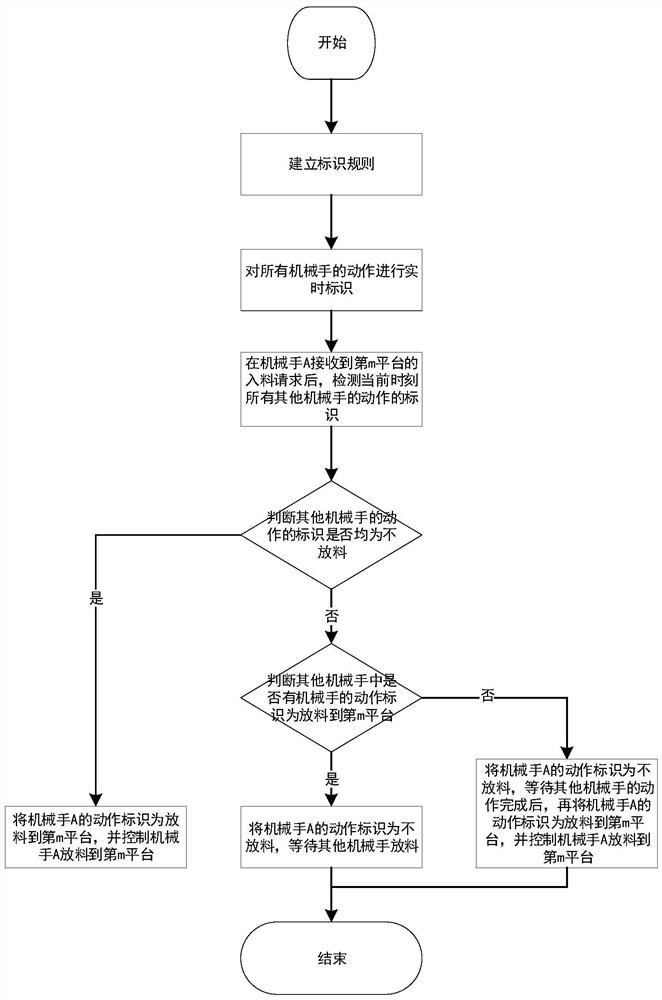
[0066] Such as figure 1 and figure 2 As shown, the embodiment of the present invention provides a collision avoidance method for cross-operation of an interference mechanism, including:
[0067] Initial step S101:
[0068] Establish identification rules, and the identification rules are used to identify the action of discharging the manipulator of the interfering mechanism to the platform; the number of manipulators exceeds 1, and the number of platforms is several; the identification types of actions include no feeding, putting Expected to the first platform, discharged to the second platform, ..., discharged to the nth platform, n is the number of platforms, and n is a positive integer;
[0069] Identification step S102:
[0070] According to the predetermined marking rules, the actions of all manipulators are marked in real time;
[0071] Detection step S103:
[0072] After the manipulator A receives the feeding request of the m-th platform, it detects the action mark...
specific Embodiment 2
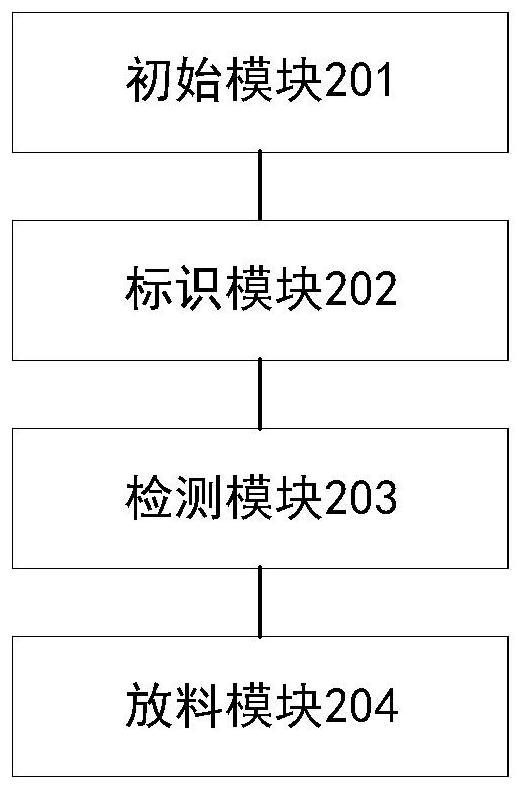
[0104] Such as image 3 As shown, the embodiment of the present invention provides an interference mechanism cross-operation anti-collision device, including:
[0105] Initial Module 201 for:
[0106] Establish identification rules, and the identification rules are used to identify the action of discharging the manipulator of the interfering mechanism to the platform; the number of manipulators exceeds 1, and the number of platforms is several; the identification types of actions include no feeding, putting Expected to the first platform, discharged to the second platform, ..., discharged to the nth platform, n is the number of platforms, and n is a positive integer;
[0107] The identification module 202 is used for:
[0108] According to the predetermined marking rules, the actions of all manipulators are marked in real time;
[0109] Detection module 203, for:
[0110] After the manipulator A receives the feeding request of the m-th platform, it detects the action marks...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses an interference mechanism cross operation anti-collision method and device. The method comprises the following steps that an identification rule is established, and the identification rule is used for identifying the actions of manipulators for placing materials on platforms; the actions of all the manipulators are identified in real time according to the rule; after the manipulator A receives a feeding request of the mth platform, the identification of the actions of the other manipulators at the current moment is detected; according to the identification types of theactions of the other manipulators, whether the material is placed on the mth platform by the manipulator A or not and when the material is placed on the mth platform by the manipulator A are controlled. According to the method and the device, the application scenes where the materials are placed to the several platforms by the several manipulators are fully considered, the method and the device are suitable for all the situations where the materials are placed to the platforms by the manipulators, by applying the method and the device, the actions of the manipulators can be scientifically andreasonably arranged, collision among the manipulators can be prevented, damage of the manipulators and possibly-caused damage of the whole interference mechanism can be avoided.
Description
technical field [0001] The invention relates to the technical field of interfering mechanism cross operation and anti-collision, in particular to an interference mechanism cross operation anti-collision method and device. Background technique [0002] In the case of cross-operation of the interference mechanism, two manipulators are often used to carry items to the same two platforms during the operation of the machine. Let the two manipulators be A and B, and the two platforms be platform 1 and 2, then when platforms 1 and 2 need to feed materials, it may happen that the two manipulators are discharging materials at the same time, and there is a danger of manipulator collision. [0003] If the number of manipulators exceeds 2 and the number of platforms exceeds 2, the application scenario will be more complicated. Once the action arrangement of the manipulators is unreasonable, collisions between the manipulators will cause damage to the manipulators and even the entire mec...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More