

Multi-target point autonomous navigation method based on Turtlebot2 robot map building
A technology of autonomous navigation and robotics, applied in the field of navigation, can solve problems such as the inability to realize multi-target point autonomous navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
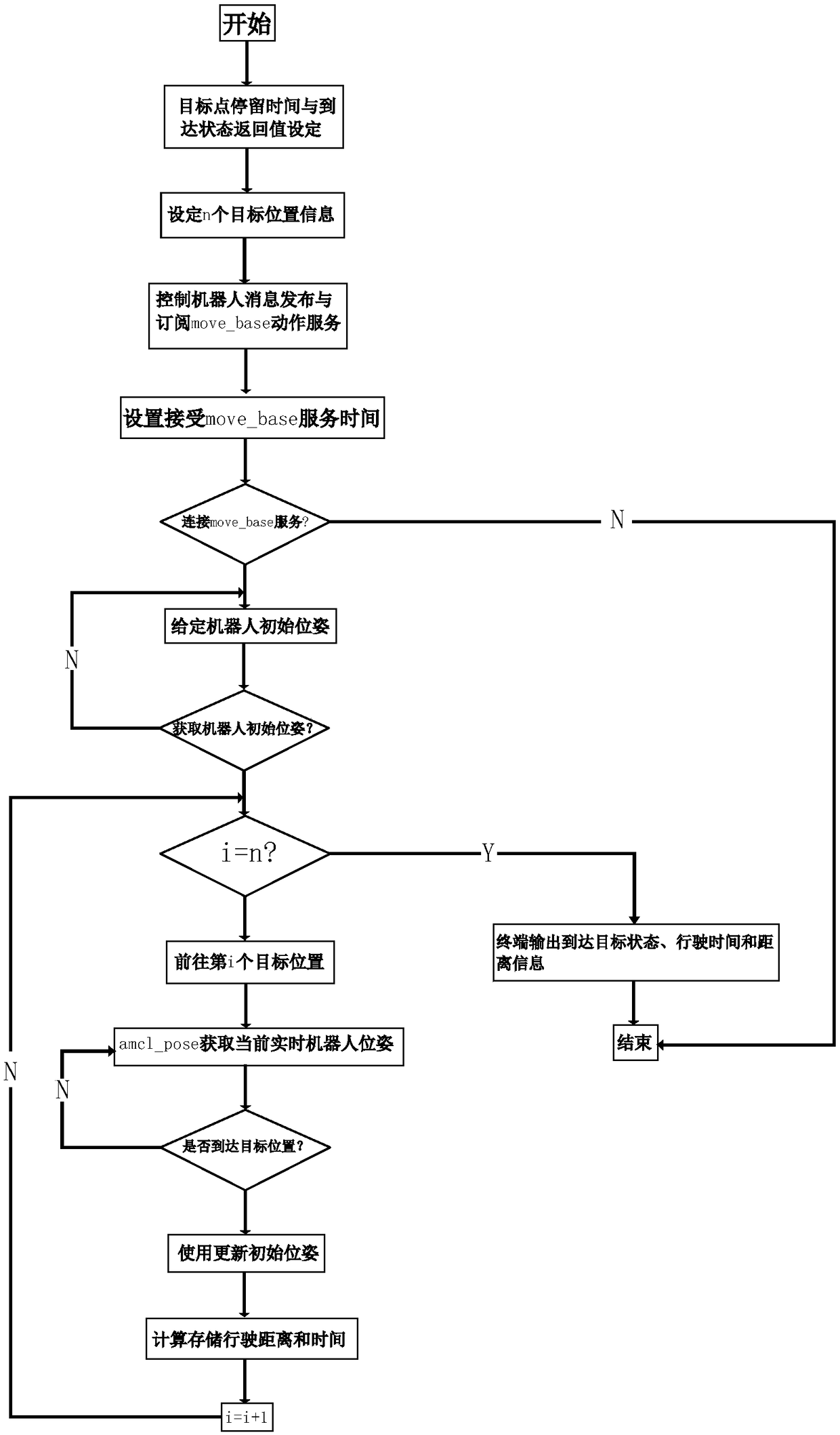
[0024] refer to figure 1 , a multi-target point autonomous navigation method for building a map based on a Turtlebot2 robot, including the following steps:
[0025] S1. Build a map;
[0026] S2. Obtain multiple target location information;
[0027] S3. Obtain the initial pose of the robot;
[0028] S4, the navigation package in ROS drives the robot to move to any target position;
[0029] S5. The positioning package in ROS obtains the real-time pose of the current robot;
[0030] S6. The robot arrives at the target position, and the initial pose of the robot is updated to the currently reached target position and the current state of the robot;
[0031] S7. Go back to step S4 until the obtained multiple target positions are all reached.
[0032] Among them, the purpose of Turtlebot is to provide a basic development platform for entry-level robot enthusiasts or mobile robot programming developers, so that people can use the software and hardware that comes with Turtlebot t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More