

A rigid-soft coupling multi-fingered dexterous hand driven by tendon rope and electromagnetic force
An electromagnetic force and dexterous hand technology, applied in the field of dexterous hands, can solve problems such as limited range of use, failure to meet rigidity requirements, etc., and achieve the effect of large grasping force, strong adaptability, and good envelopment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and examples of implementation. It should be understood that the specific implementation cases described here are only used to explain the present invention, not to limit the present invention.
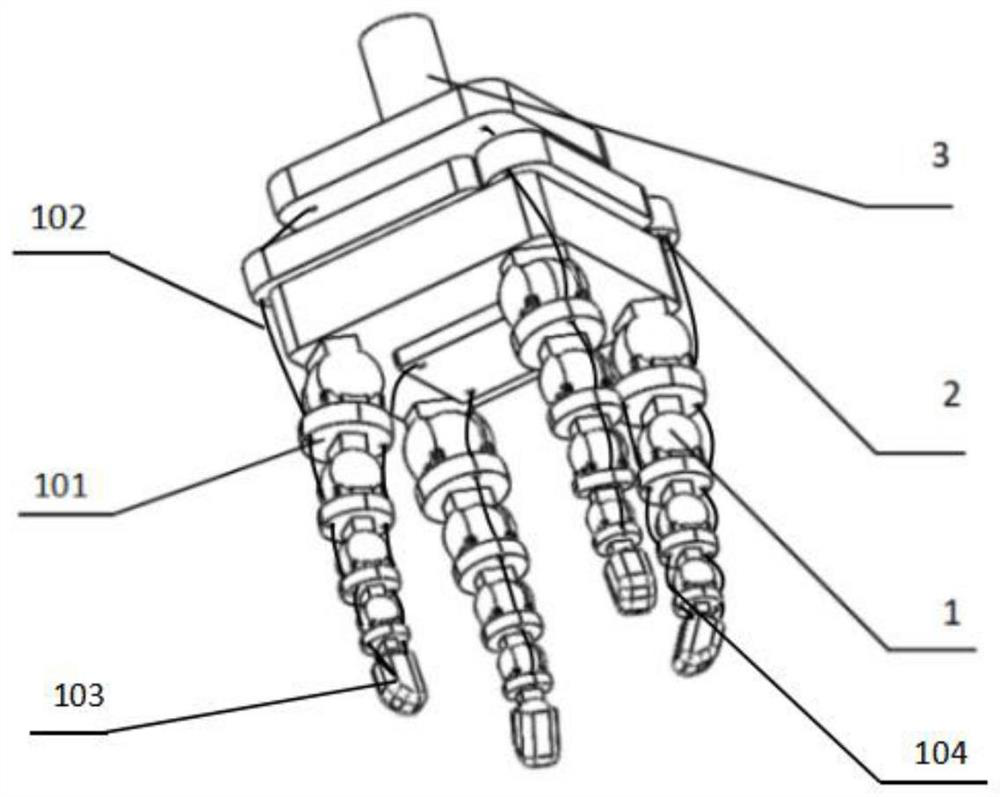
[0023] The present invention is mainly composed of four mechanical fingers 1, a mechanical palm 2, and a transmission module 3. figure 1 shown. Among them, the mechanical finger 1 is the core part of the dexterous hand. The mechanical finger 1 is placed on the mechanical palm 2, and the transmission module 3 is used to control the opening and closing of the mechanical finger part. After grabbing the specified object, the inner tendon rope 104 of the transmission module is tightened, and then the electromagnetic force between the joints of the mechanical fingers is used. to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More