

Robust control method for unmanned aerial vehicle attitude, and robust controller for achieving method
A robust controller and robust control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as little consideration of interference classification, and achieve the effect of maintaining system stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0053] It should be emphasized that in the process of describing the present invention, various formulas and constraints are distinguished by using consistent labels, but it does not exclude the use of different labels to mark the same formulas and / or constraints. The purpose of such setting is In order to illustrate the features of the present invention more clearly.
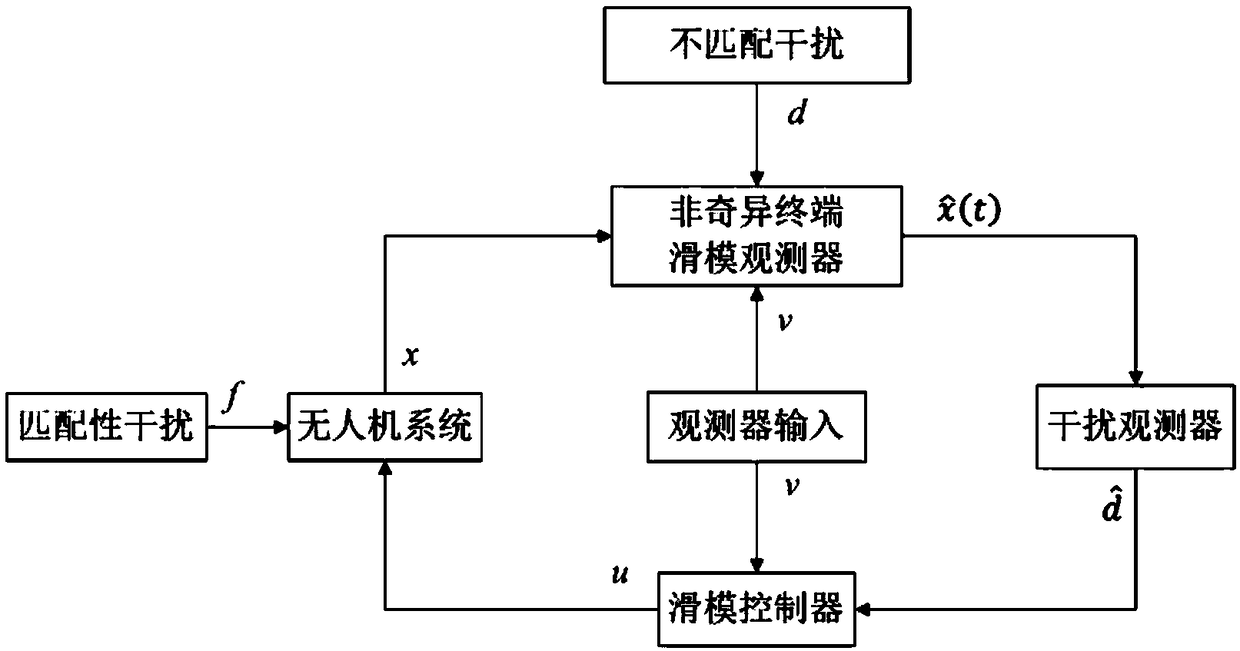
[0054] Such as figure 1 As shown, in order to stabilize the attitude system of the quadrotor UAV, considering the existence of matching disturbance f and mismatching disturbance d in the UAV system, by proposing a non-singular terminal sliding mode observer and a disturbance observer based on The control strategy, so as to realize the real-time observation and compensation of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More