

Multi-spacecraft cooperative control method based on integral sliding mode and model predictive control
A technology of model predictive control and integral sliding mode, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as insufficient anti-interference and communication defects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention is described in further detail below in conjunction with accompanying drawing:
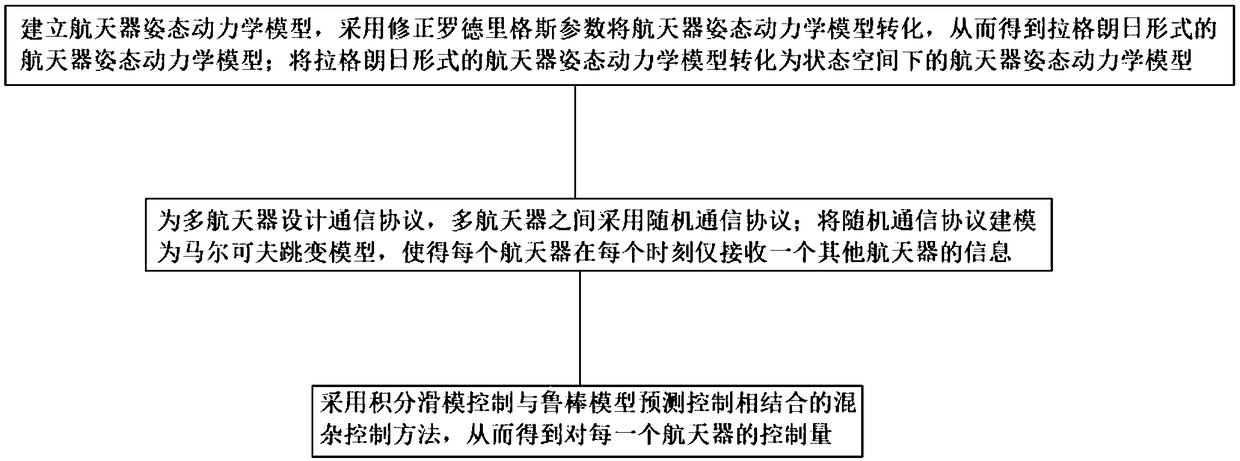
[0074] see figure 1 , the present invention provides a multi-spacecraft cooperative control method based on integral sliding mode and model predictive control, comprising the following steps:
[0075] Step 1): Establish the spacecraft attitude dynamics model, and transform the spacecraft attitude dynamics model by using the modified Rodrigues parameters, so as to obtain the spacecraft attitude dynamics model in Lagrangian form; The spacecraft attitude dynamics model is transformed into the spacecraft attitude dynamics model in the state space. Here, by transforming the attitude dynamics model of the spacecraft into the state space, it is beneficial to the design of the cooperative control algorithm.
[0076] Step 2): Design a communication protocol for multiple spacecraft, and use a random communication protocol between multiple spacecraft; model the random communica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More