

Detection rescue robot with whole course automatic obstacle avoiding capacity
A rescue robot and ability technology, applied in the field of rescue robots, can solve problems such as the influence of rescue progress and the inability to realize autonomous obstacle avoidance ability, and achieve the effect of improving the obstacle cleaning range, realizing autonomous obstacle avoidance ability, and avoiding impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
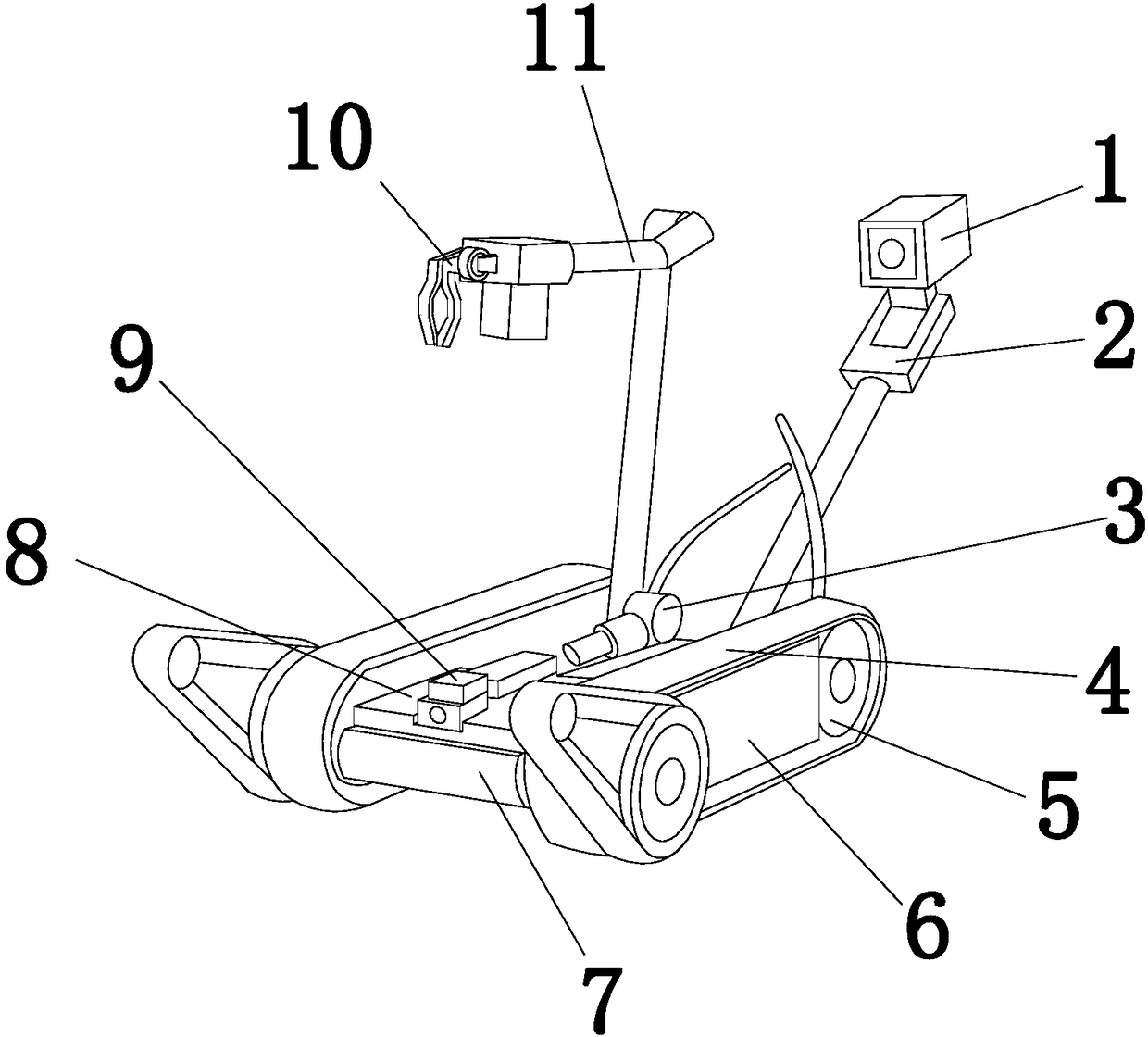
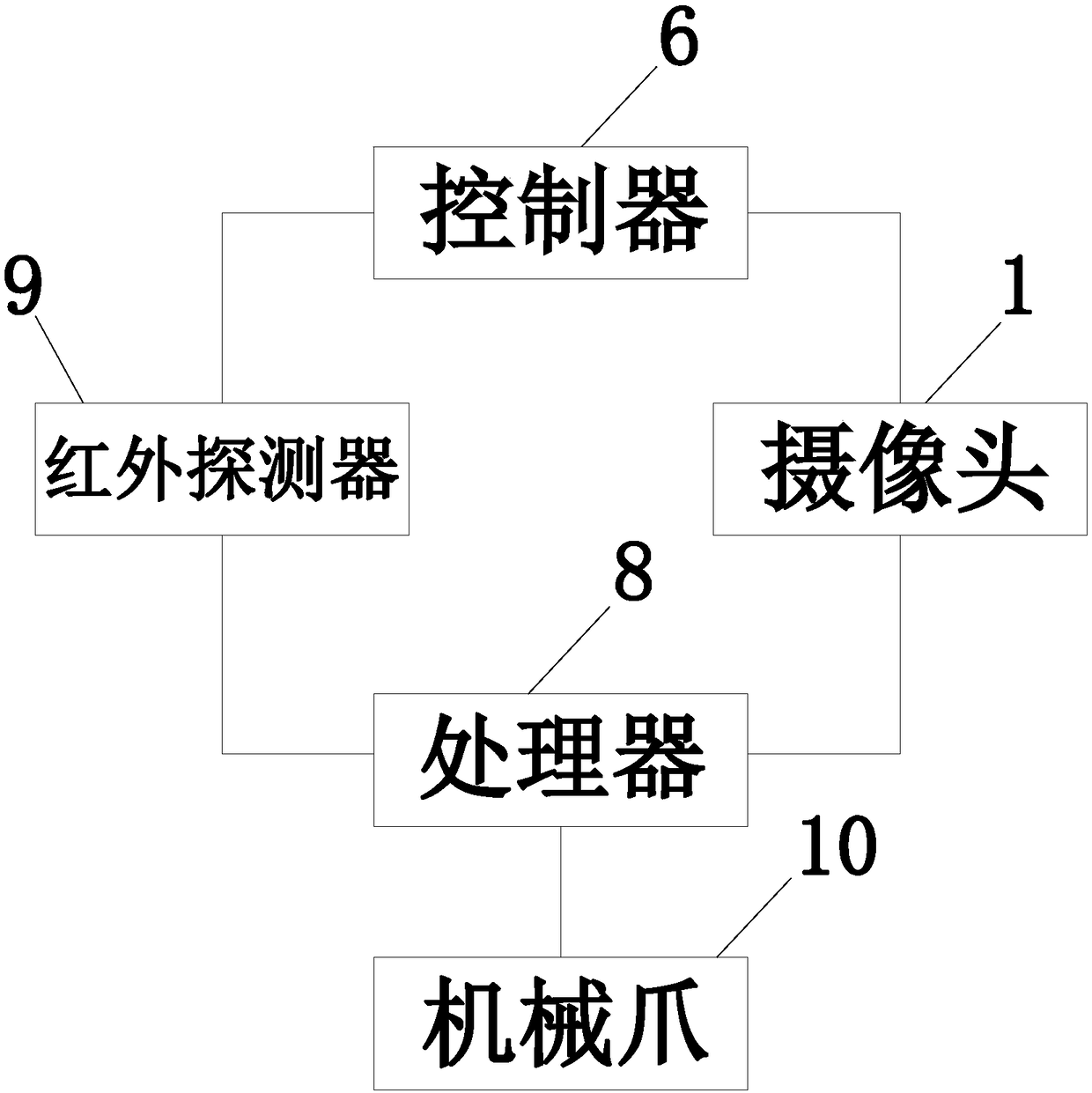
[0018] see Figure 1-Figure 2 , the present invention provides a detection and rescue robot with full autonomous obstacle avoidance capability: its structure includes a camera 1, a camera bracket 2, a signal receiver 3, a track wheel 4, a wheel hub 5, a controller 6, an anti-collision chassis 7, a processor 8. Infrared detector 9, mechanical claw 10, mechanical claw bracket 11, the track wheels 4 are located in two and located on both sides of the anti-collision chassis 7, and the anti-collision chassis 7 is provided with movable devices The groove of the processor 8, the infrared detector 9 is arranged on the processor 8 by embedding, the mechanical claw 10 is connected with the mechanical claw bracket 11, and the bottom of the mechanical claw br...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More