

A local feature description method based on three-dimensional point cloud
A local feature, three-dimensional point cloud technology, applied in the field of computer vision, can solve problems such as unevenness, sensitivity, noise resolution, etc., to achieve the effect of accelerating feature matching efficiency, strong discrimination and robustness, and saving storage space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
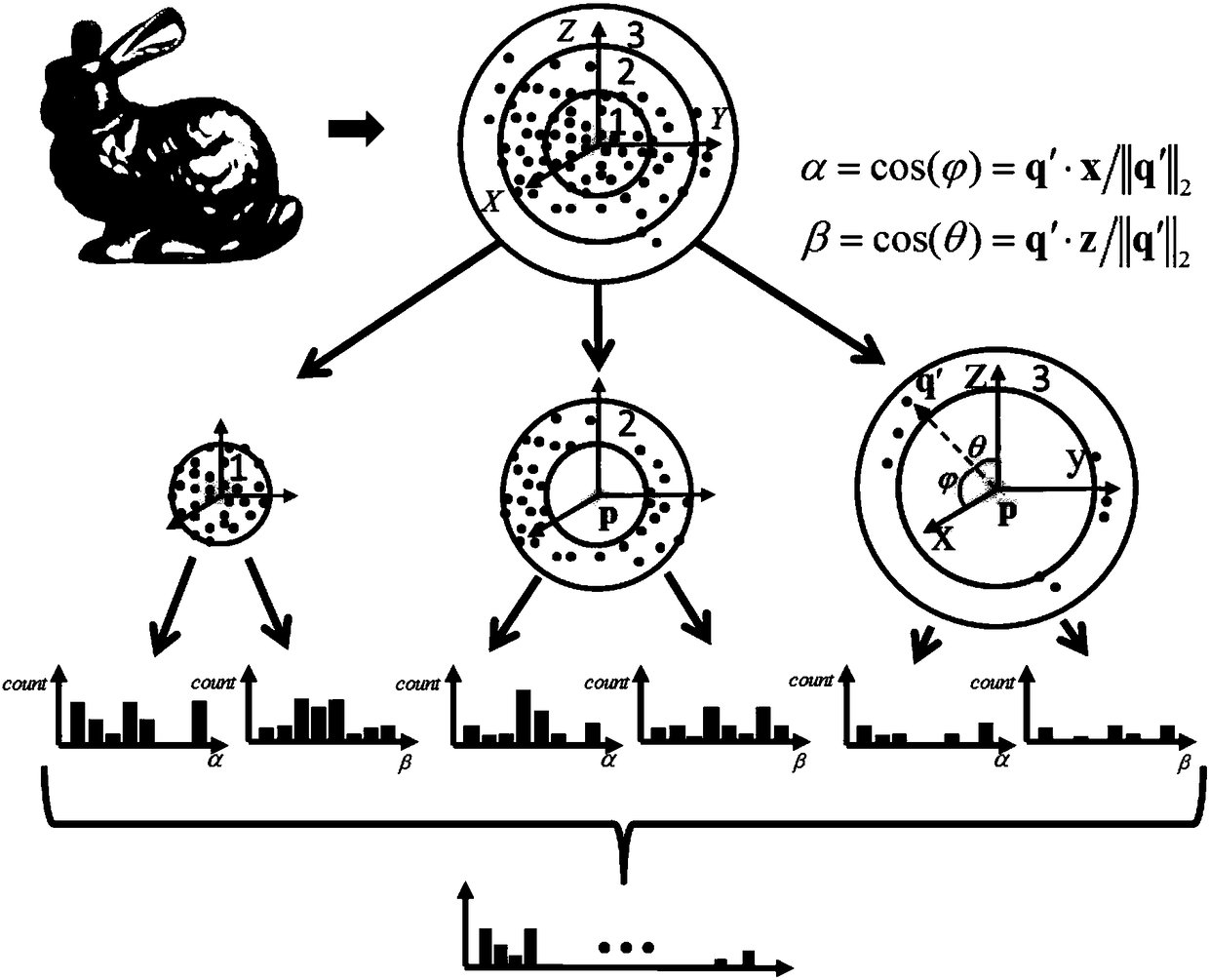
[0042] The present invention will be further described in detail below with reference to the drawings and embodiments.
[0043] The present invention is oriented to practical engineering applications and proposes a local feature description method based on a three-dimensional point cloud, which can realize the matching of similar parts between two point cloud scenes, and is suitable for complex and changeable background conditions. The present invention includes the following four steps: 1. Extract a number of feature points from the scene point cloud, take each feature point as the center, and establish a three-dimensional local coordinate system according to the points in its spherical neighborhood; 2. The point is transformed into the corresponding local coordinate system, and the spherical neighborhood is divided into the space area along the radial direction; 3. For each divided space area, calculate the relationship between each point located in it and the x-axis and z-axis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More