

Zero position calibration method and device for mechanical arm joint sensor
A calibration method and technology for calibrating equipment, applied in manipulators, manufacturing tools, etc., can solve problems such as high cost and large installation space, and achieve the effect of improving efficiency, improving measurement efficiency, and simplifying measurement equipment and measurement process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
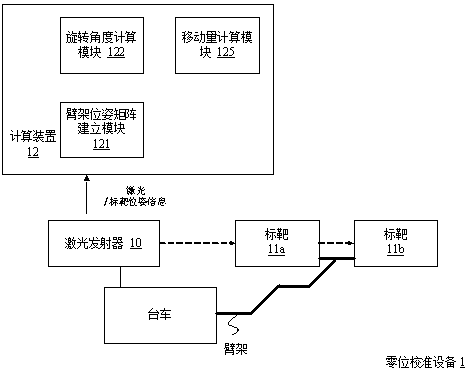
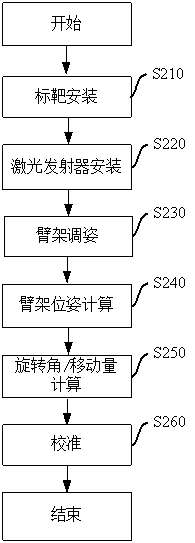
[0087] figure 1 It is a structural schematic diagram of Example 1 of the zero position calibration device of the robot arm joint sensor of the present application, figure 2 It is a schematic flowchart of Example 1 of the zero calibration method for the joint sensor of the manipulator of the present application. Refer below figure 1 with figure 2 This example will be described.
[0088] Such as figure 1 As shown, the zero calibration equipment 1 includes a computing device 12, a laser emitter 10 and two targets 11a and 11b arranged on a trolley. Wherein, a pattern is provided on each target, and in this example, the pattern is preferably roughly in the shape of a "ten", such as a solid cross "┼" (see Figure 7 (A) left picture), of course, in addition to the solid cross, it can also be a hollow cross "╬" (cf. Figure 7 (A) Right panel). During the calibration process, the two targets 11a and 11b are installed in parallel on the set end arm of the mechanical arm to b...
no. 2 example
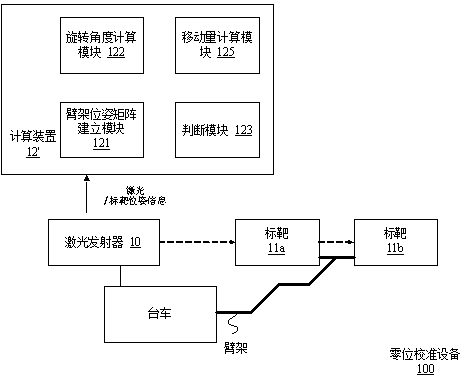
[0128] image 3 It is a structural schematic diagram of Example 2 of the zero position calibration device of the robot arm joint sensor of the present application, Figure 4 It is a schematic flow chart of Example 2 of the zero calibration method for the joint sensor of the manipulator of the present application. Also refer to below image 3 with Figure 4 This example will be described.
[0129] Such as image 3 As shown, the zero calibration device 100 includes a computing device 12', a laser transmitter 10 and two targets 11a and 11b arranged on a trolley. In this example, the laser emitter 10 and the targets 11a and 11b used are generally consistent with the first embodiment, and a cross laser emitter (the laser spot is in the shape of a "cross") and a "cross" pattern in the center is also used. Target. Computing device 12 ′, except possessing functions substantially consistent with computing device 12 of the first embodiment, also includes a judging module 123, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More