Obstacle avoidance prediction method based on speed obstacle model and collision probability density model
A speed obstacle and collision probability technology, applied in the field of obstacle avoidance prediction based on the speed obstacle model/collision probability density model, can solve problems such as increasing computational complexity, and achieve the effect of reducing fatigue and complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
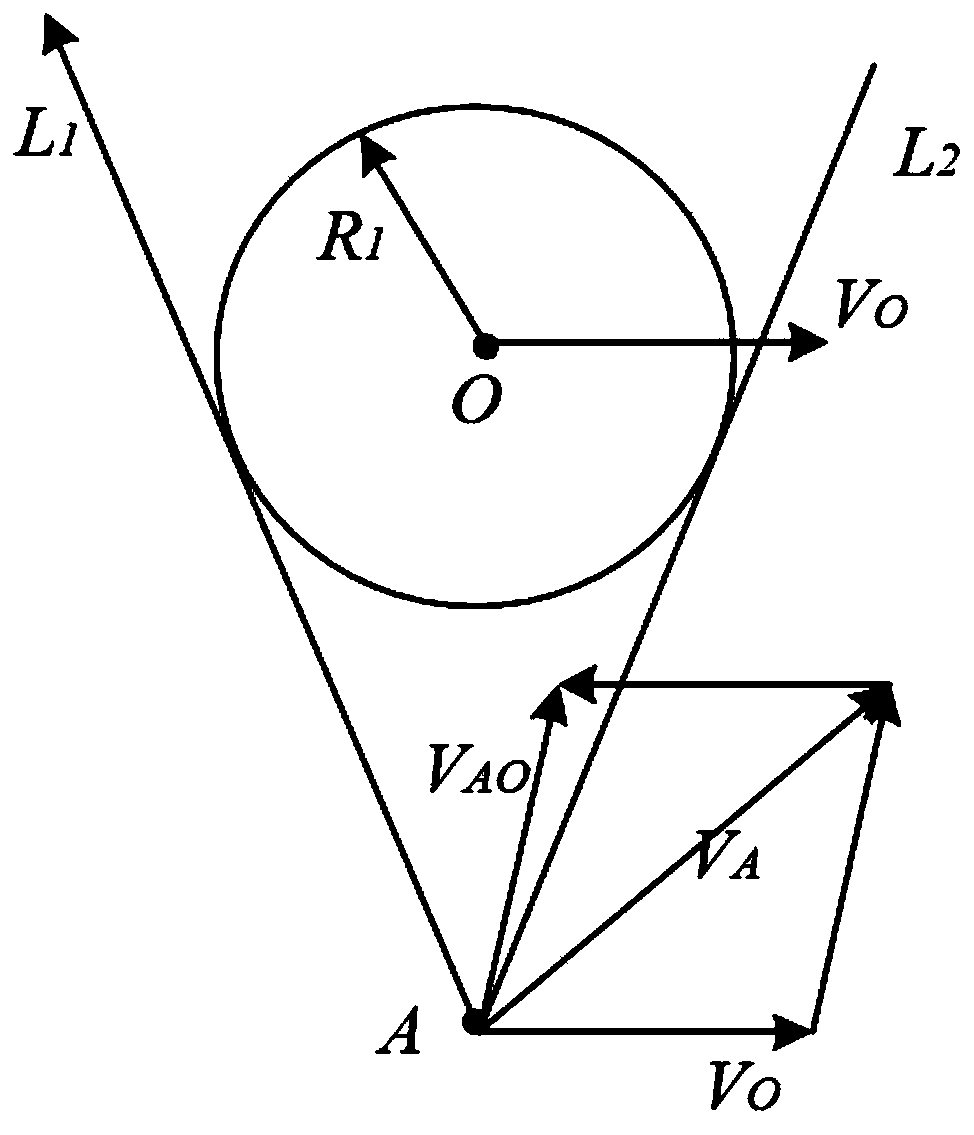
[0063] Such as figure 2 As shown, the speed obstacle model is established by the following method: suppose the own vehicle is the mass point A, the puffing treatment of the obstacle vehicle is circle O, and the radius of circle O is R 1 Is the sum of the larger size of the length and width of the obstacle vehicle and the larger size of the length and width of the own vehicle. The distance between the mass point A and the circle O is the distance between the own vehicle and the obstacle. Point A leads two rays L 1 And L 2 , Respectively circumscribe both sides of circle O, L 1 And L 2 The sandwiched conical surface forms a speed obstacle cone, and the speed vector of the own vehicle is v A , The speed vector of the obstacle vehicle is v O , Then the relative speed vector of the own vehicle relative to the obstacle vehicle is v AO .
[0064] Based on the speed obstacle model, the on-board controller determines the possibility of collision between its own vehicle and the obstacle ve...
Embodiment 2
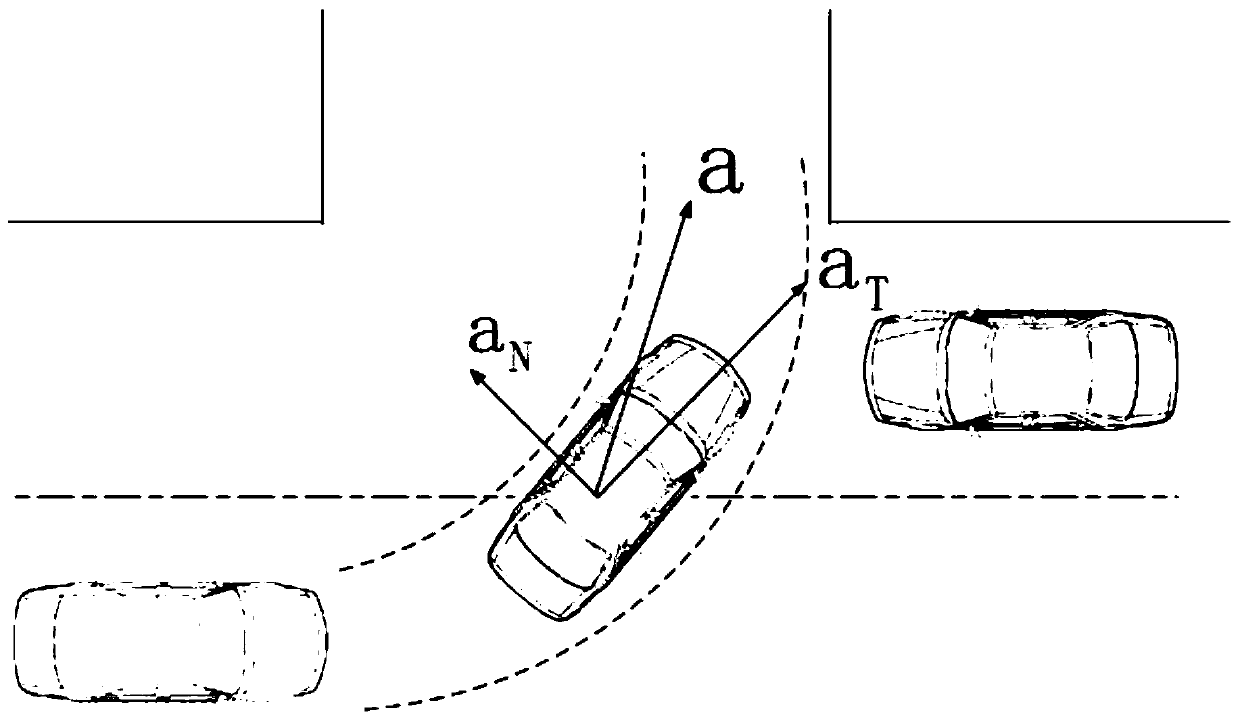
[0066] Such as Figure 3~5 As shown, the collision probability density model is established by the following method:
[0067] Ⅰ. Calculation of acceleration a of own vehicle: such as image 3 As shown, the current own vehicle is driving at acceleration a, and the centripetal acceleration is a N , The tangential acceleration is a T ;
[0068] Centripetal acceleration of own vehicle a N The calculation formula is as follows:
[0069]
[0070] Among them: v is the current driving speed of the own vehicle, ρ(s) is the radius of the path trajectory arc of the own vehicle, which are all obtained by the on-board controller through the on-board sensing module. When ρ(s) is 0, the own vehicle is currently traveling in a straight line When, mark it as a N =0;
[0071] Tangential acceleration of own vehicle a T The formula for the relationship with the rate of change of velocity v is as follows:
[0072]
[0073] Where: k 1 And k 2 Are given constant values, k 1 Is the rolling friction coefficie...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com