

Predictive control method for guaranteeing closed-loop stability of inverted pendulum system based on RBF-ARX model
A RBF-ARX, predictive control technology, applied in the field of infinite domain model predictive control, can solve the problems of not considering the closed-loop stability of the system, the control effect of the controller is easily affected by changes in the external environment, and the accuracy of the model depends on the accuracy. High practical value, improve dynamic and static performance, and ensure the effect of closed-loop stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
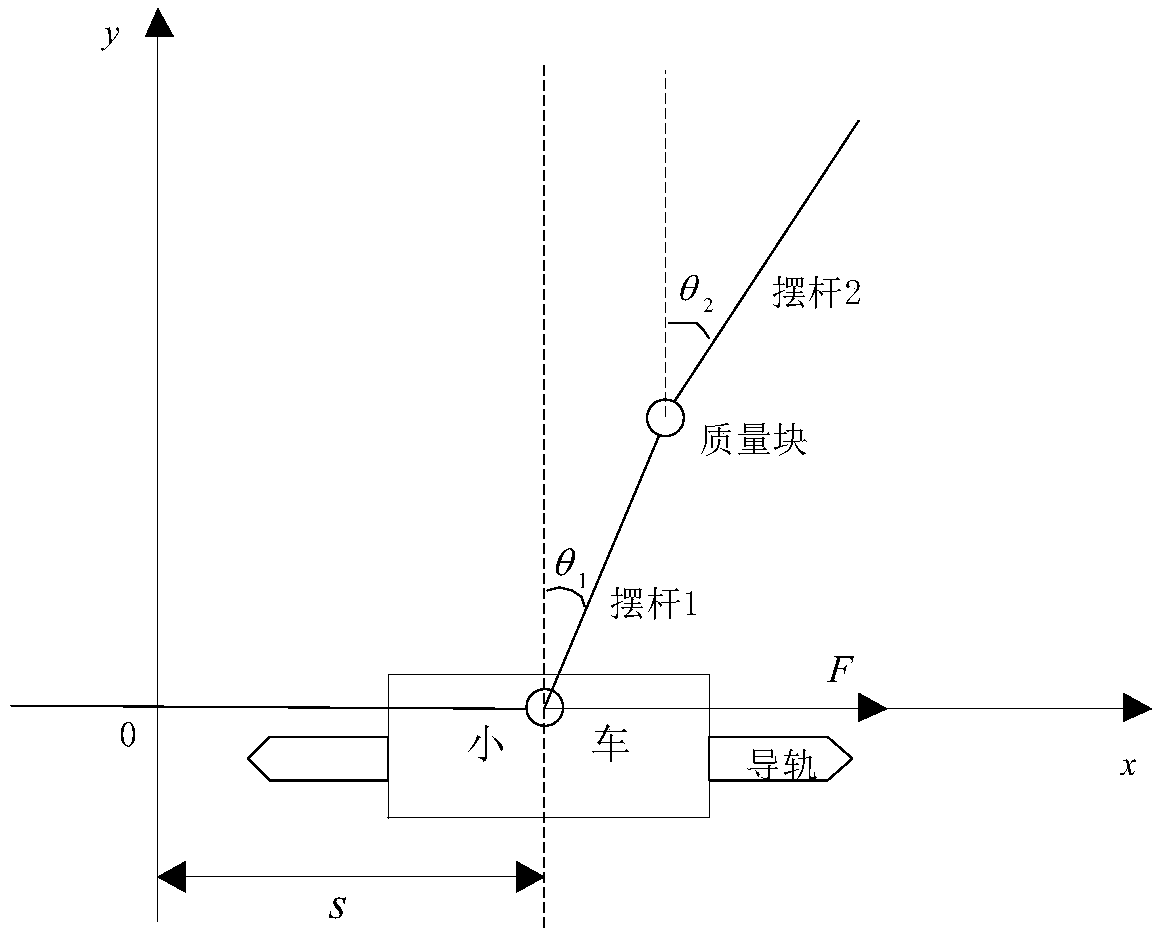
[0025] The linear two-stage inverted pendulum system of the present invention is as figure 1 shown. The linear motor is connected to the trolley through the conveyor belt, the trolley is connected to the first swing rod (ie the swing rod 1) through the connecting block, and the second swing rod (ie the swing rod 2) is connected to the first swing rod through the mass block. During the control process, the motor controls the trolley through the conveyor belt so that the trolley moves along the track. figure 1 Move left and right in the x-axis direction, and then control the first pendulum and the second pendulum in figure 1 Swing around the y-axis in the xy-plane. The parameters of the linear two-stage inverted pendulum system are shown in Table 1.
[0026] Table 1 Structural parameter list of linear two-stage inverted pendulum
[0027]
[0028] The present invention utilizes data-driven identification technology, adopts a modeling method based on RBF-ARX without offset it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More