

Underwater anti-shaking alignment method for SINS (strapdown inertial navigation systems)/DVL (Doppler velocimeters) of deep-sea underwater vehicles
A submersible and deep-sea technology, applied in the field of navigation, can solve the problems of attitude determination speed and accuracy reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0109] The present invention will be further illustrated below in conjunction with specific embodiments, and it should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
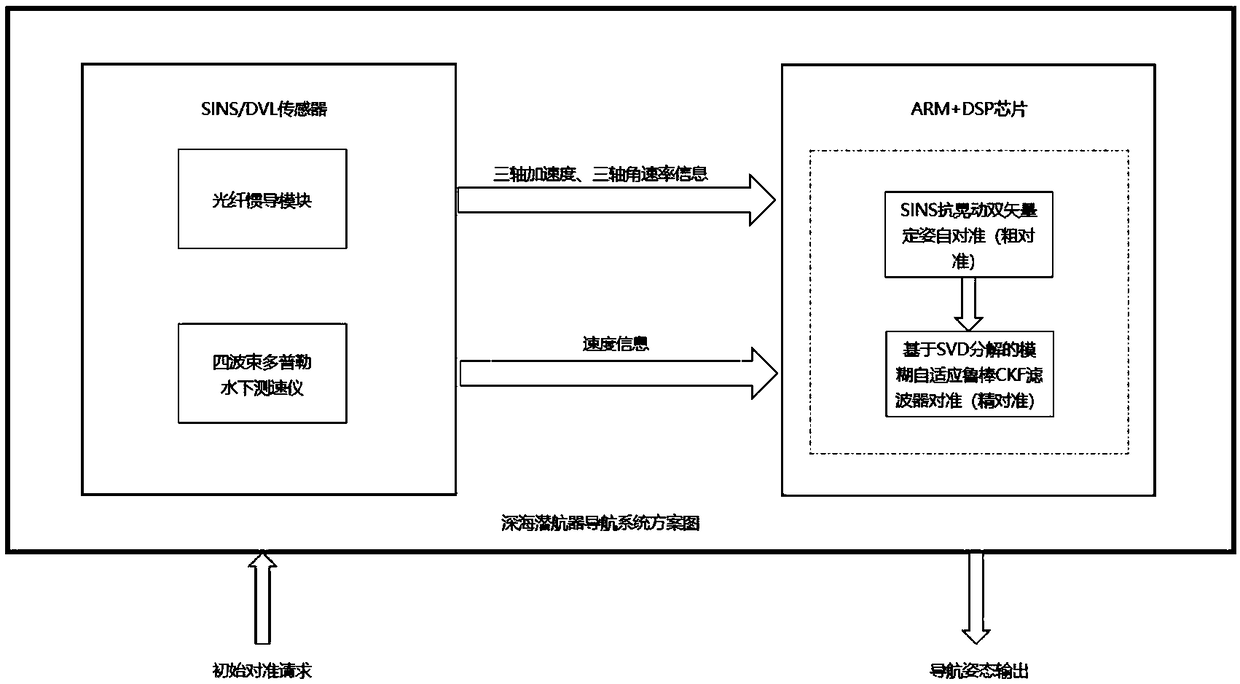
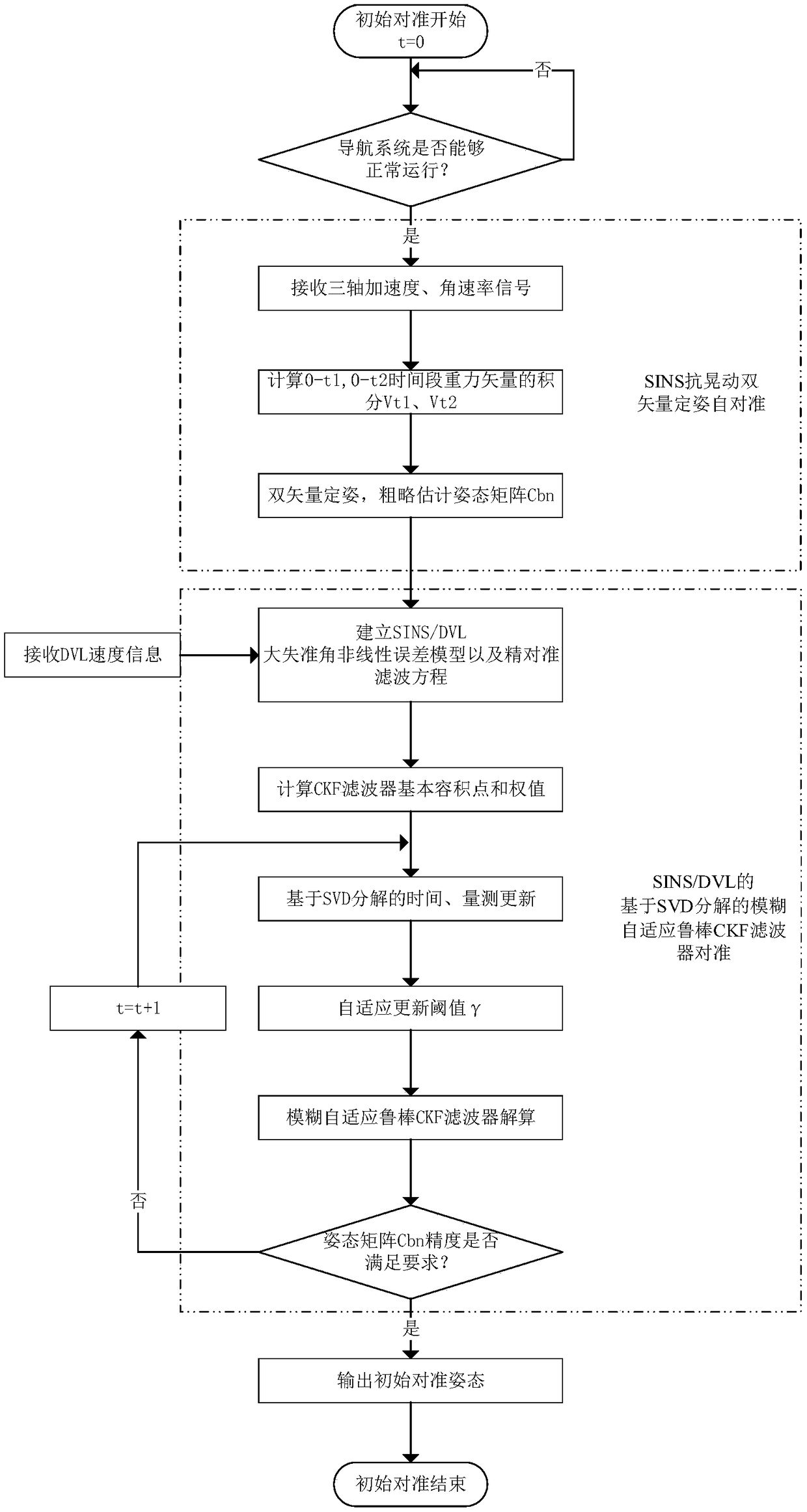
[0110] Such as figure 1 , 2 As shown, it is a scheme diagram of a deep-sea submersible navigation system disclosed by the present invention and a specific underwater initial alignment flow chart.
[0111] The specific implementation steps are as follows:
[0112] 1) Before alignment, according to the underwater complex environment and the characteristics of SINS and four-beam DVL navigation systems, analyze the principle of SINS / DVL navigation and positioning, and then establish a large misalignment angle nonlinear error model and fine alignment filter equation.
[0113] Select the northeast sky geographic coordinate system as the navigation coordinate system (n system), select the navigat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More