

Obstacle crossing robot
A technology of robots and racks, applied in the field of robots, can solve problems such as poor mobility, poor adaptability, and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The specific implementation of the invention of an obstacle-surmounting robot will be described in detail below in conjunction with the accompanying drawings.
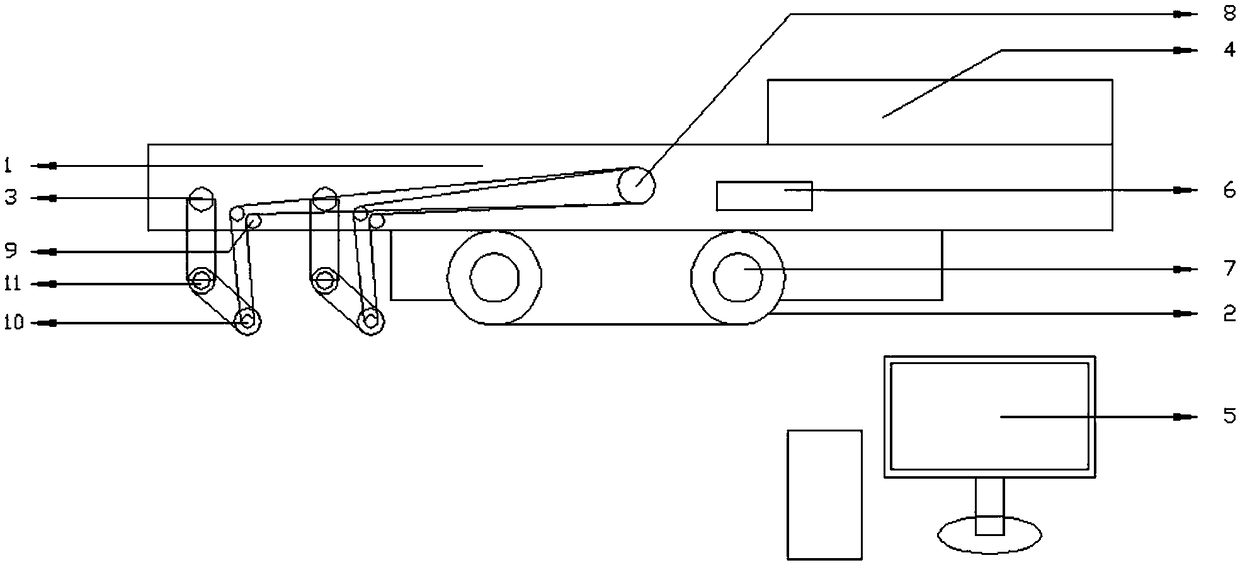
[0016] Such as figure 1 As shown, the present invention is specifically an obstacle-crossing robot, including a frame 1, a crawler belt 2 and two mechanical arm mechanisms 3; the control system includes a controller 4, a remote operation console 5, a visual sensor 6, a drive motor 7 and The motor 8 is rotated, and the controller 4 is connected to an AC power supply of 220V.
[0017] Wherein said crawler belt 2 is divided into two groups, is installed on the bottom of frame 1, and main crawler belt 2 assembly comprises front wheel, rear wheel and main crawler belt 2, and described front wheel and rear wheel are installed on frame 1 in rotation, Described main crawler belt 2 is installed on the front wheel and the rear wheel. Wherein the vision sensor 6 is installed on the four sides of the robot, and the vision...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More