

Automatic demounting robot for frame-supporting column formwork for building construction
A technology for dismantling robots and building construction. It is applied in the direction of construction, building structure, and on-site preparation of building components. It can solve the problems of high work efficiency, low labor intensity, and low demolition efficiency, and achieve high work efficiency and low labor intensity. Small, efficient demolition effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
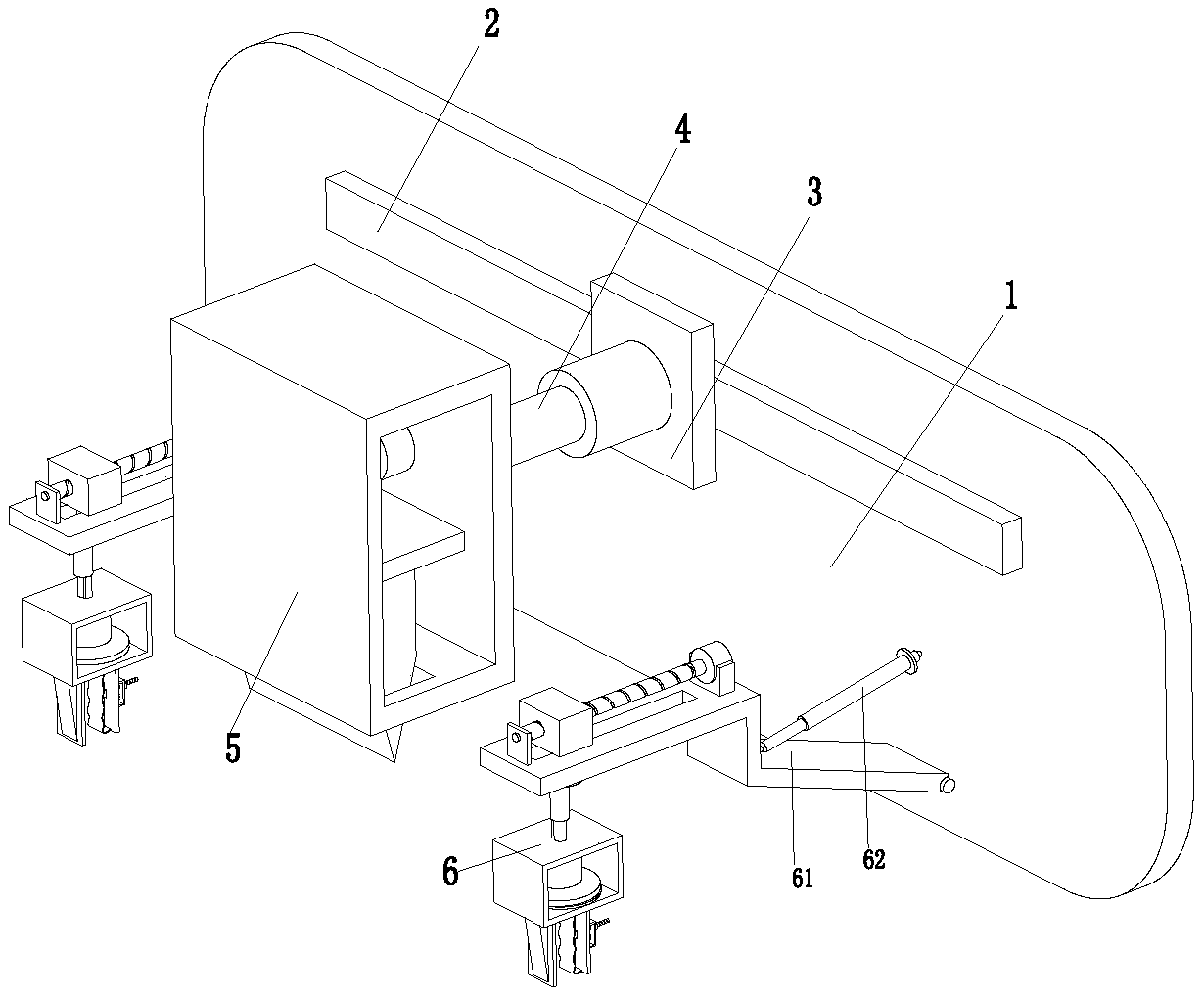
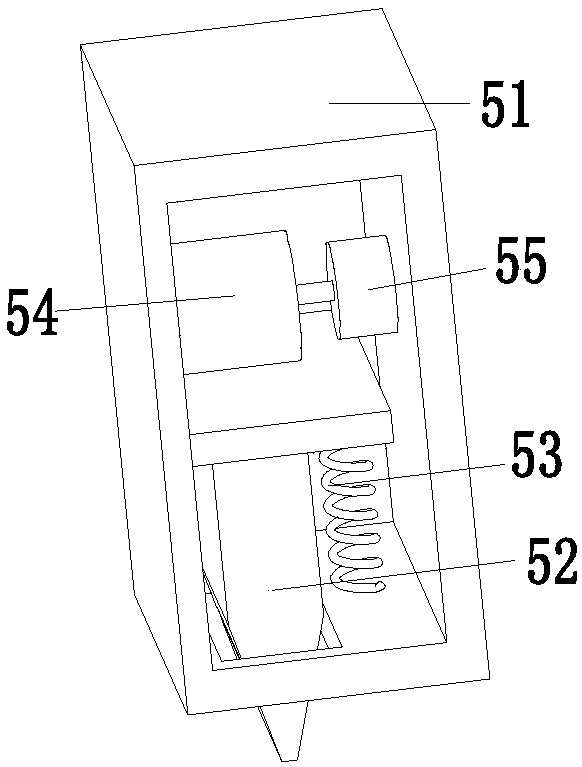
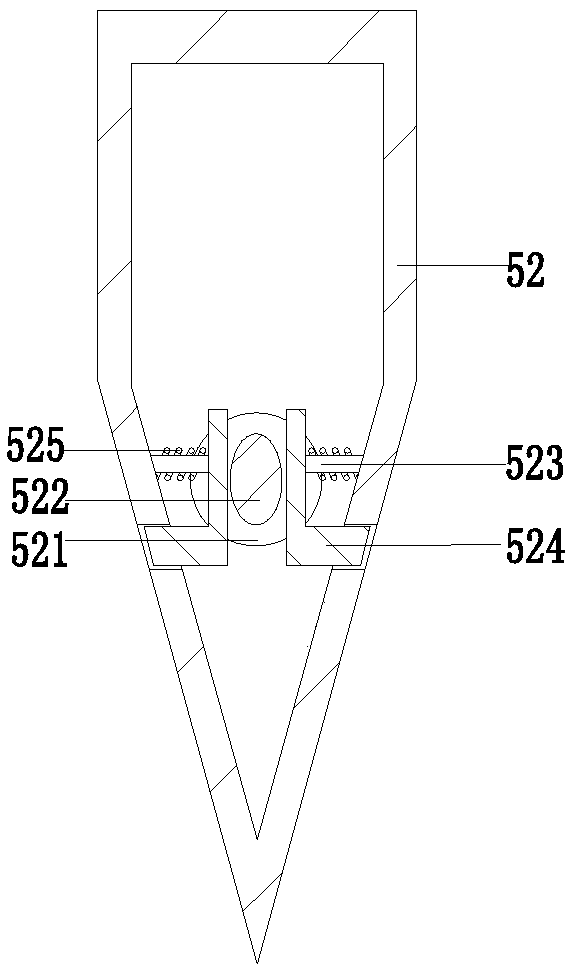
[0025] Such as Figure 1 to Figure 4 As shown, a robot for automatically dismantling frame and pillar templates for building construction includes a mounting plate 1, a mobile electric slider 2 is installed on the side wall of the mounting plate 1, a mobile sliding plate 3 is installed on the mobile electric sliding block 2, and a mobile sliding plate 3 The mobile telescopic cylinder 4 is installed on the top, and the top of the mobile telescopic cylinder 4 is equipped with an executive chisel device 5. The left and right sides of the installation plate 1 are symmetrically equipped with an executive removal device 6. The mobile electric slider 2 and the mobile electric slider 2 are controlled. Execute the chisel device 5 to perform movement and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More