

Mowing robot vision obstacle avoidance method, mowing robot and readable storage medium
A lawn mowing robot and obstacle avoidance technology, which is applied in the direction of lawn mowers, harvesters, cutters, etc., can solve the problem that the lawn mowing robot does not have selective avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
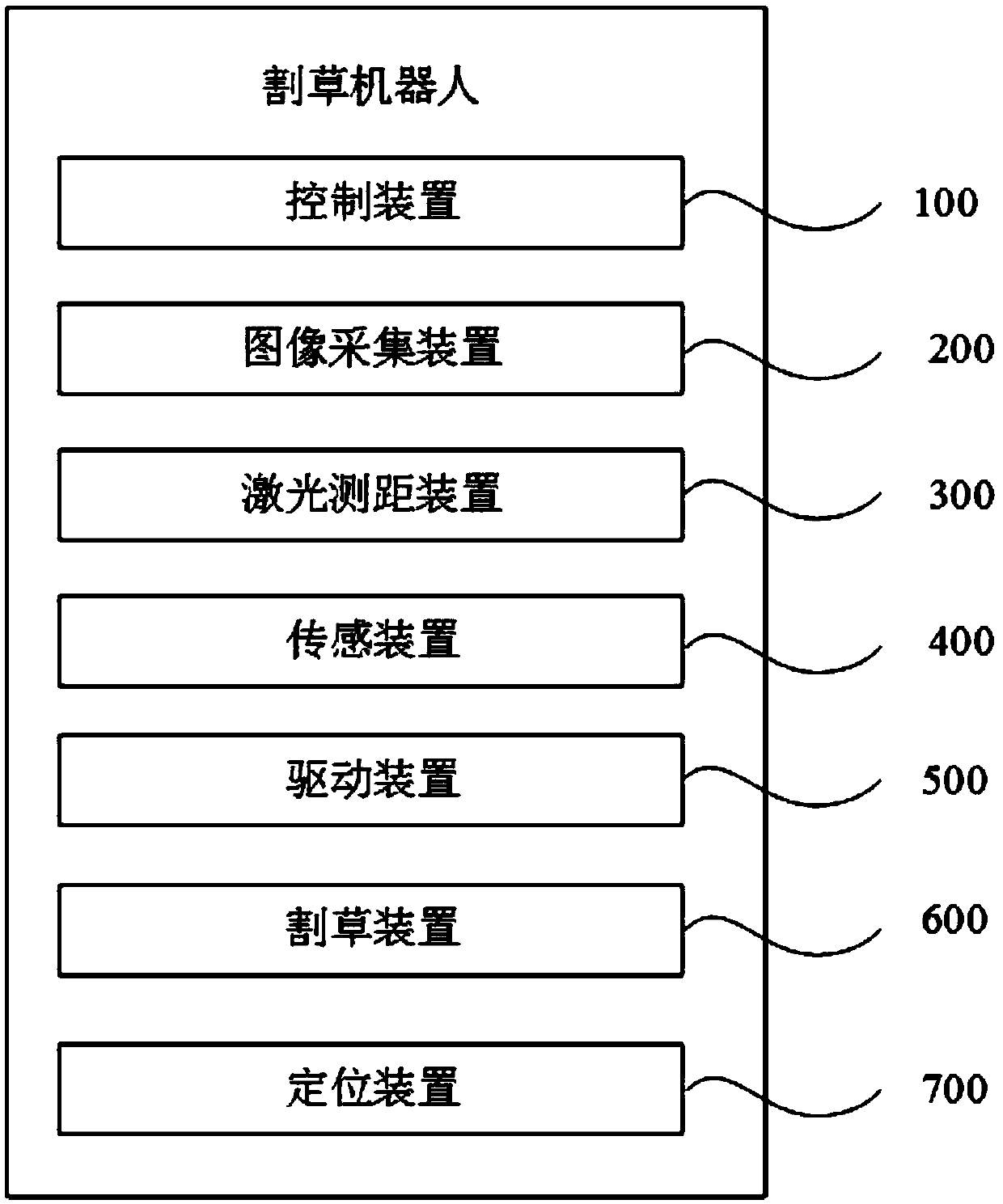
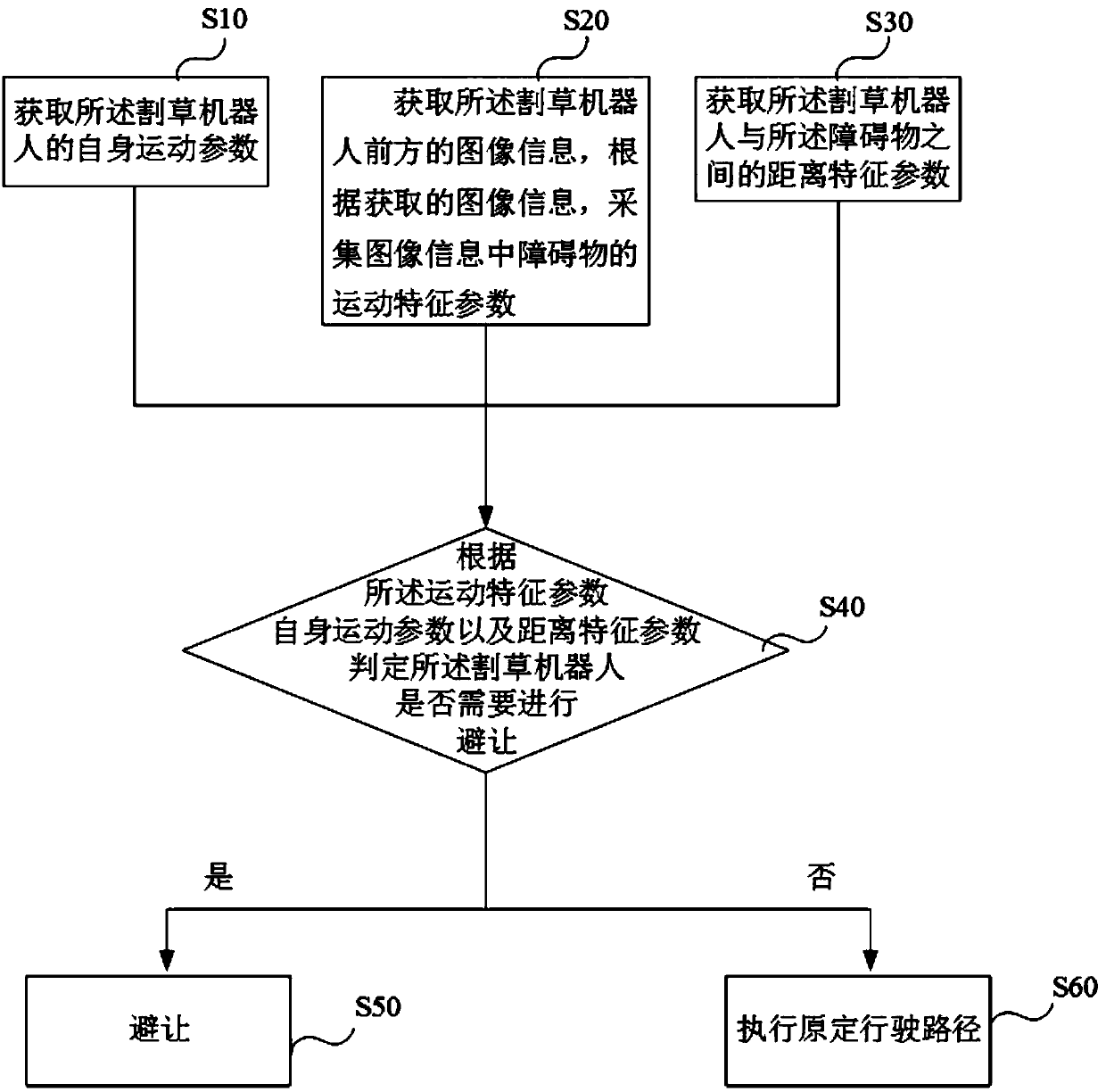
[0031] The main solution of the embodiment of the present invention is to obtain the self-motion parameters of the mowing robot;
[0032] Obtain image information in front of the lawn mowing robot, and collect motion characteristic parameters of obstacles in the image information according to the acquired image information;
[0033] Acquiring characteristic parameters of the distance between the mowing robot and the obstacle;
[0034] According to the motion characteristic parameters, self-motion parameters and distance characteristic parameters, it is determined whether the lawn mowing robot needs to avoid, and if it does not need to avoid, execute the original driving route.
[0035] In the prior art, the obstacle avoidance method adopted by the mowing robot is to detect the position of the obstacle in front of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More