
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for grabbing and loading waste with multi-freedom-degree linkage mechanism
A linkage mechanism and degree of freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high precision requirements, complex structures, and reduced dynamic performance, and achieve the effect of overcoming high precision requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
example
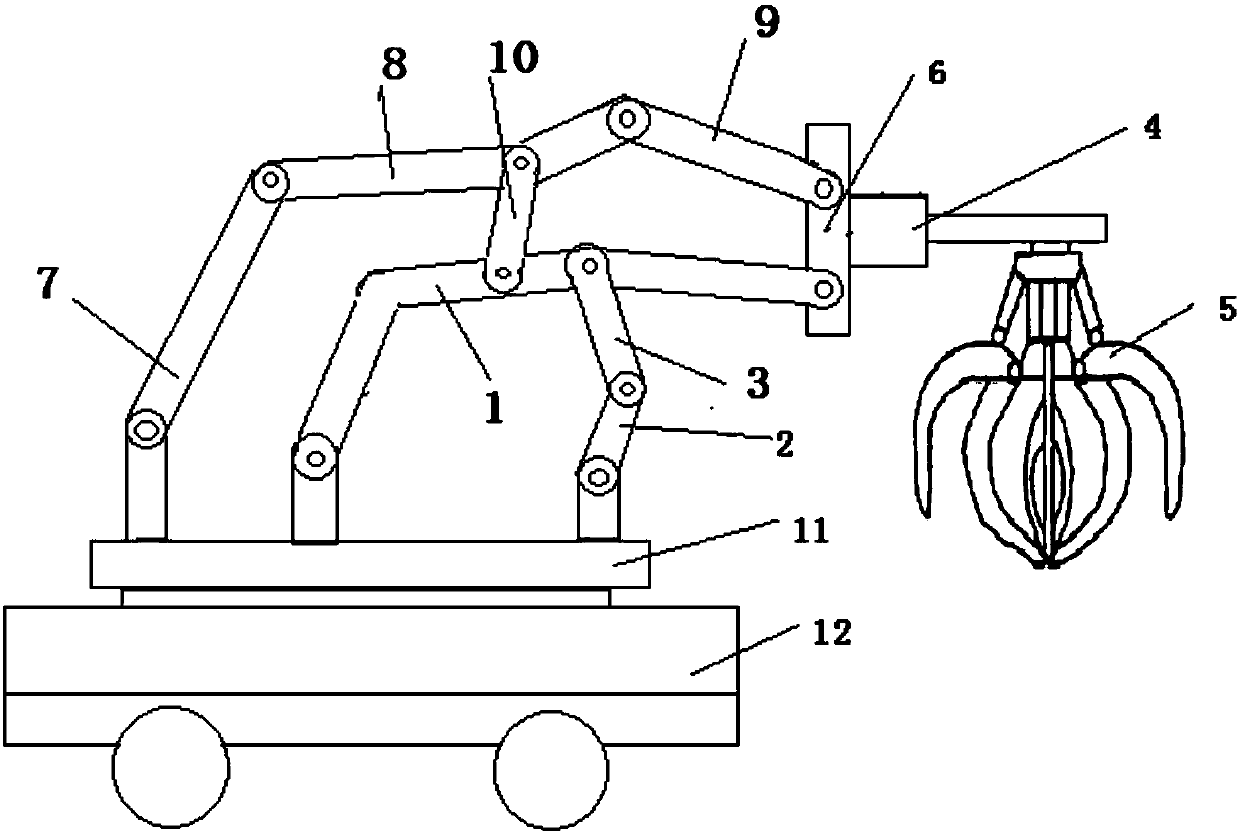
[0009] Working example: a method of grasping and loading waste using a multi-degree-of-freedom linkage mechanism. During work, the lifting mechanism composed of the boom 1, the boom driving rod 2, and the boom connecting rod 3 drives the wrist and claw of the industrial waste grabbing machine. Lifting up and down, the pitching mechanism that forearm driving rod 7, forearm 8, forearm connecting rod 9 and big and small arm connecting rod 10 form drives industrial waste grasping machine wrist and pawl pitching motion simultaneously. A working cycle process of grabbing industrial waste is: after the gripper grabs industrial waste, the rotary platform rotates to rotate the gripper for grabbing industrial waste to the set position, and the motor drives the arm drive rod 2 to realize the lifting of the wrist link 6. After reaching the designated industrial waste grabbing position, the motor drives the forearm drive rod 7 to realize the wrist connecting rod 6 to bend down, and then the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com