

Snake robot mechanism and motion control method based on gyro precession effect
A snake-like robot and gyroscope technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of high power consumption, high motor output torque requirements, large robot size, etc., and achieve the effect of reducing additional unbalanced torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solutions of the present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
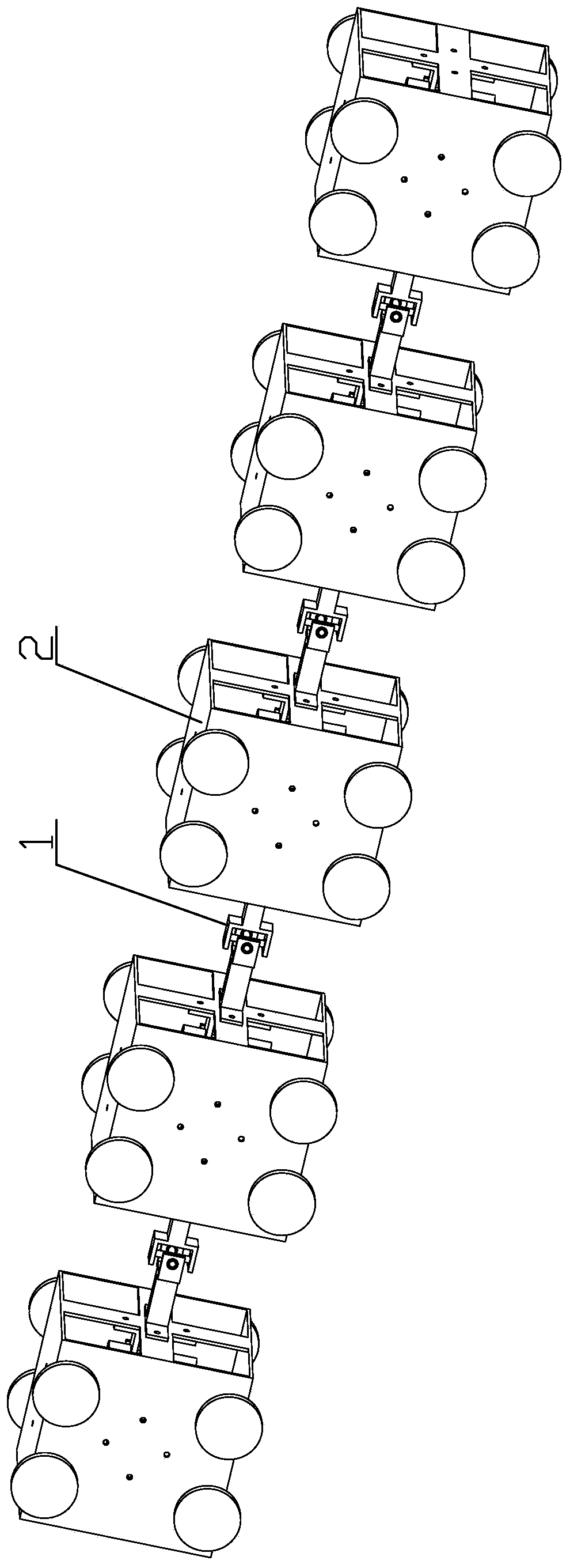
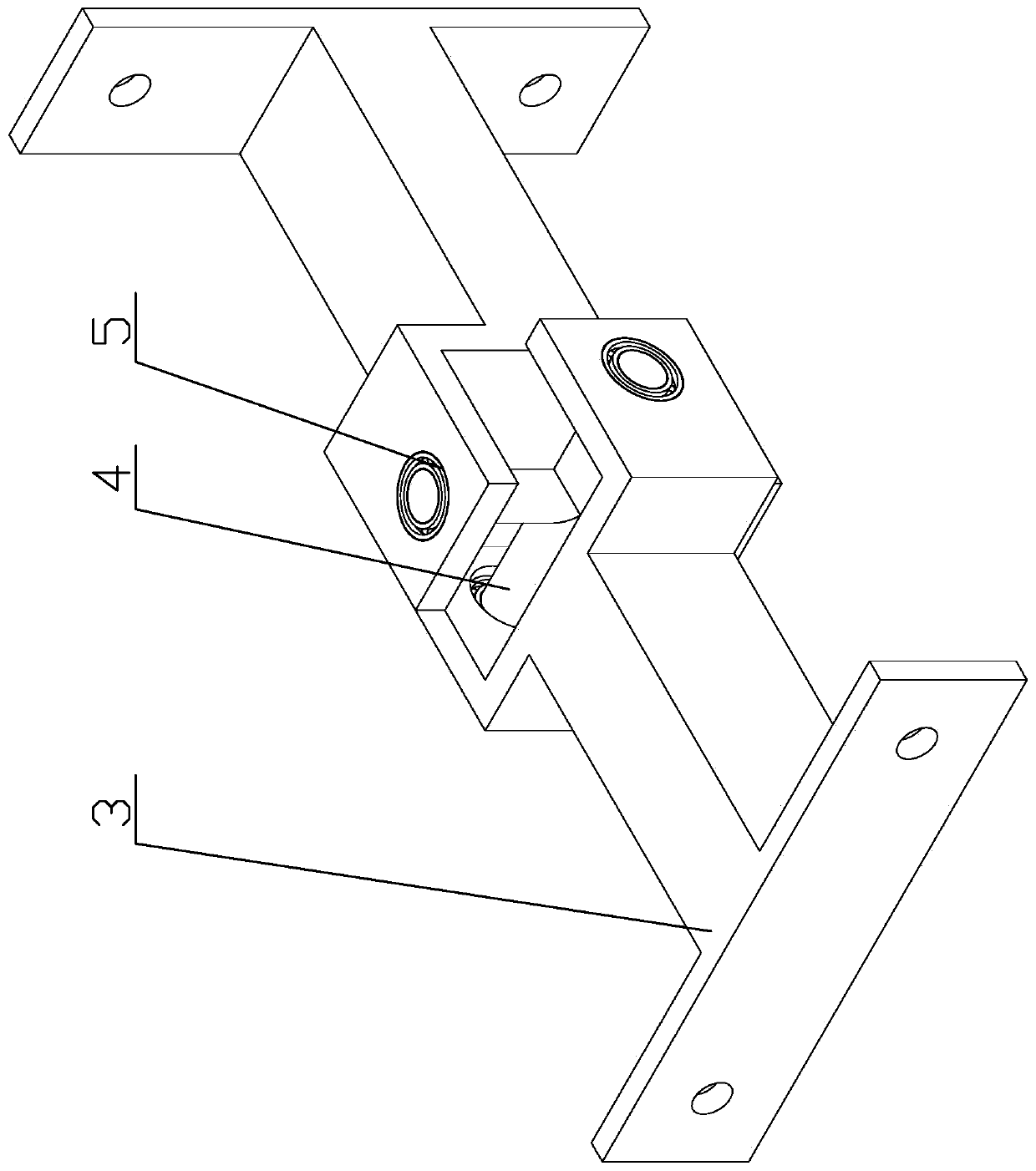
[0031] The snake robot mechanism based on the gyro precession effect of the present invention comprises a multi-section module unit 2 and a cross universal joint unit 1 connecting each module unit 2, such as figure 1 shown.
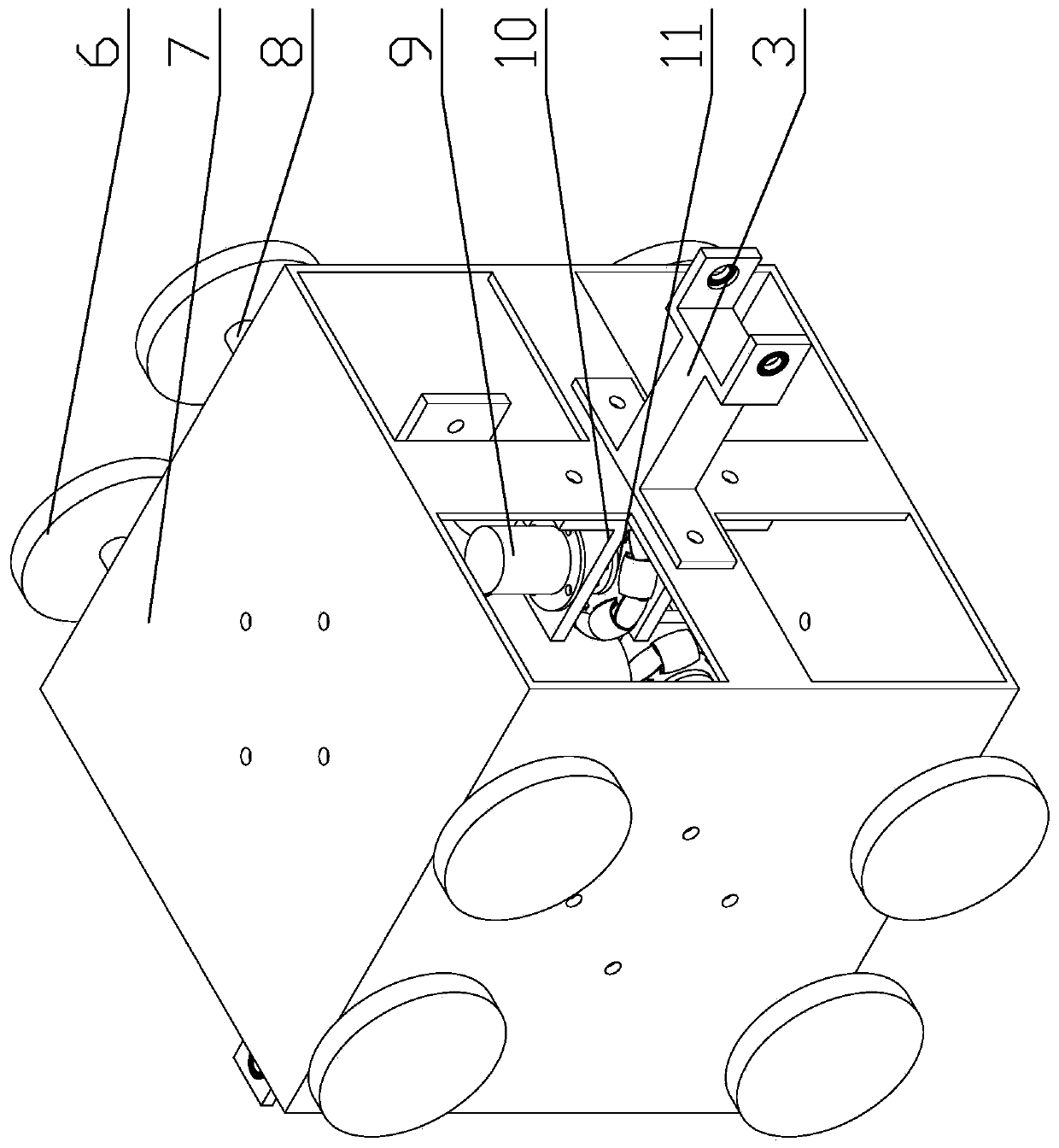
[0032] The module unit 2 includes a cube support 7, a small wheel 6, a gyro rotor mechanism installed inside the cube support 7, and an omnidirectional wheel drive unit; the small wheel 6 is installed on the top and bottom of the cube support 7 through a small wheel shaft 8, Mainly to support the module unit 2, the gyro rotor mechanism includes a spherical bracket 12 and a gyro rotor 13 inside the spherical bracket 12, and the gyro rotor 13 is driven by a rotor motor 16 with an incremental encoder And carry out high-speed rotation, the gyro rotor 13 is installed on the spherical support 12 by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More