

Spherical Robot Mechanism and Walking Method Based on Gyro Precession Effect
A spherical robot and gyroscope technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to realize self-rotation movement, inability to move robots in all directions, and difficulty in realizing the self-rotation movement of spherical robots, so as to achieve the effect of improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solutions of the present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
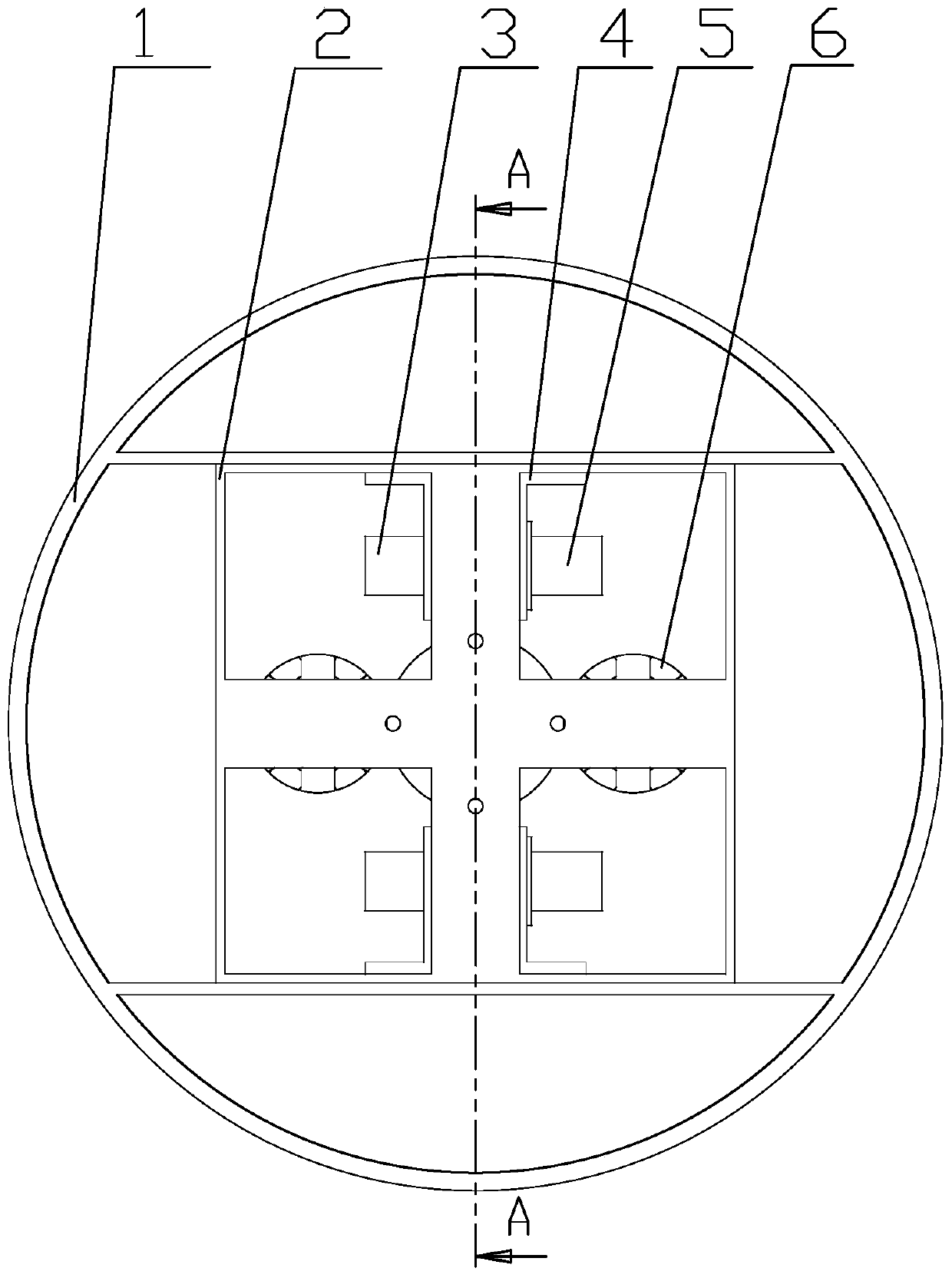
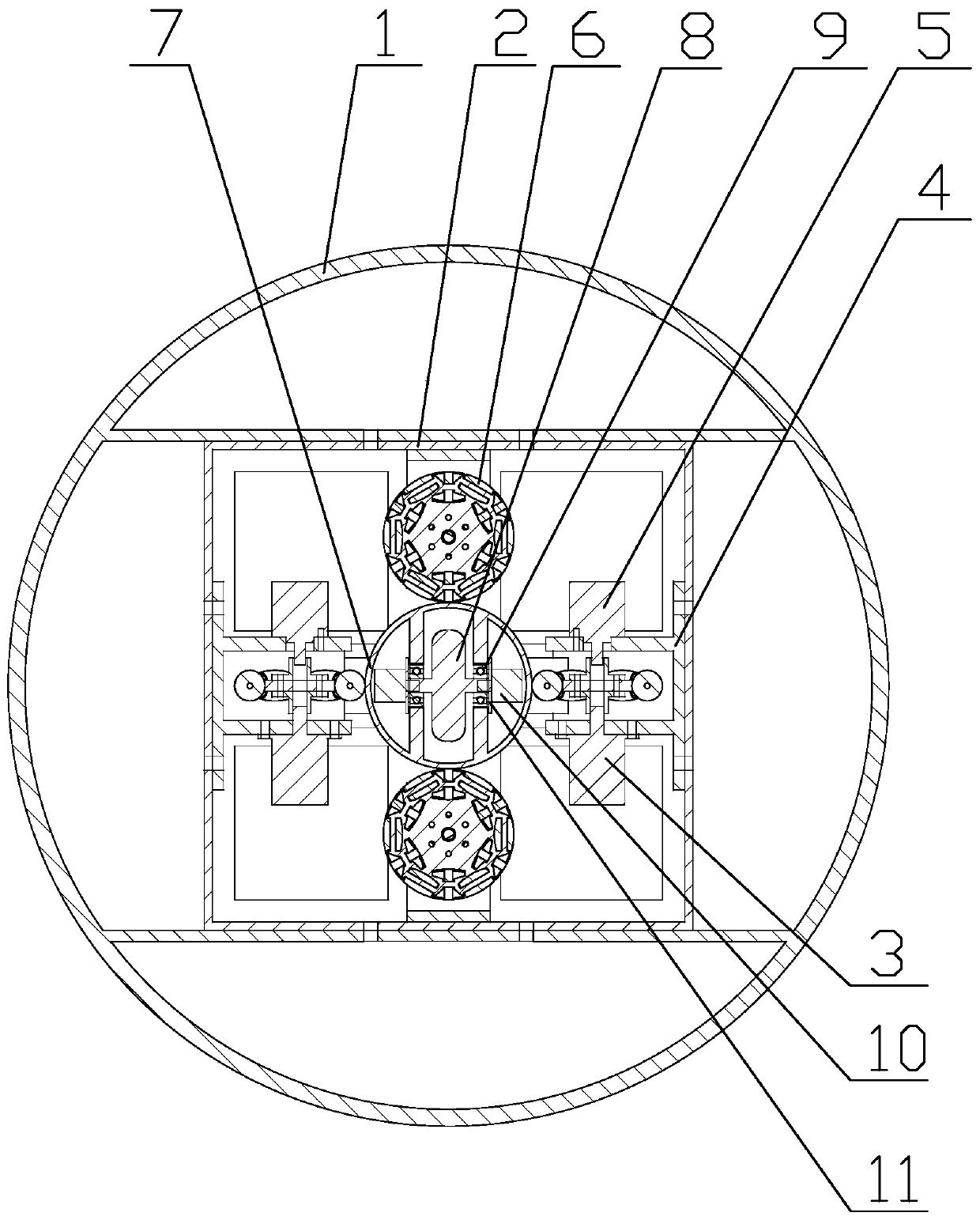
[0024] The spherical robot mechanism based on the gyro precession effect of the present invention includes an outer spherical shell 1 and a gyro drive unit directly installed on the outer spherical shell 1, such as figure 1 , 2 shown.
[0025] The gyro drive unit includes a cube support 2 and a gyro rotor mechanism and an omnidirectional wheel drive unit located inside the cube support 2. The gyro rotor mechanism includes a spherical gyro support 7 and a gyro rotor 8 located inside the spherical gyro support 7. The gyro rotor 8 is driven by a rotor motor 10 with an incremental encoder and rotates at high speed. The gyro rotor 8 is mounted on the spherical gyro bracket 7 through the rotor bearing 9, and the rotor motor 10 is mounted on the spherical gyro through the support plate 11. On the support 7, the center of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More