

Teaching Robot Data Collector System Based on Optical Motion Capture
A technology of data acquisition system and teaching robot, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of insufficient data stability and insufficient infrared laser scanning distance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be described in further detail below in conjunction with the accompanying drawings.
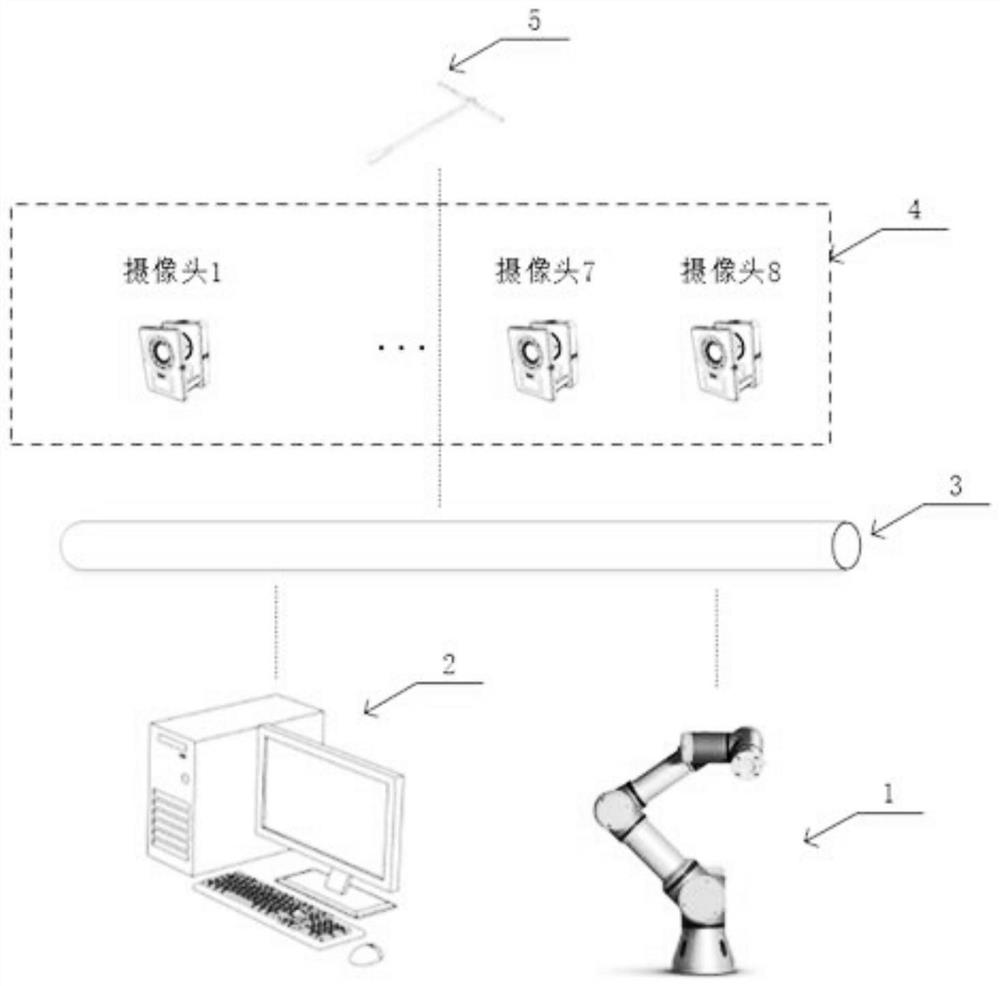
[0059] A teaching robot data acquisition system based on optical motion capture, such as figure 1 As shown, the platform mainly includes: teaching robot 1, robot teaching device processing terminal 2, switch 3, optical motion capture system camera 4, and operation tool 5. Use the optical motion capture system camera 4 to calibrate the operation tool and the teaching robot. After the calibration is completed, use the robot teaching device processing terminal 2 to send an acquisition command to the optical motion capture system camera to collect the position and attitude data of the operation tool 5 The robot teaching device processing terminal 2 carries out data transmission through the switch 3 and the optical motion capture system camera 4, and collects and receives the position and attitude data information of the operation tool 5 transmitted from the optic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More