

Multi-soft-body combined type flexible grabbing industrial assisting mechanism
An auxiliary mechanism and flexible technology, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve the problems of complex joints, low cost-effective design, prone to failure, etc., to improve grasping efficiency, simplify overall control, grasp Get the best results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
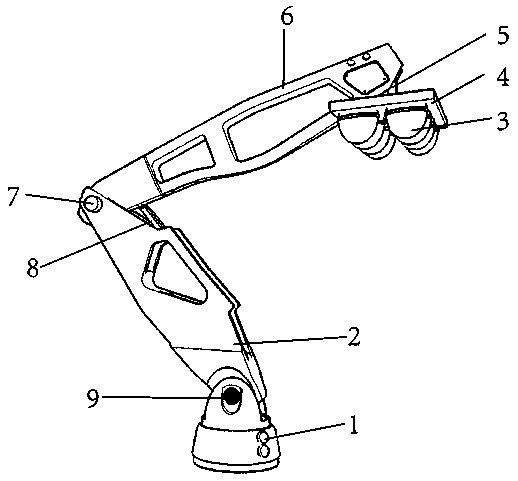
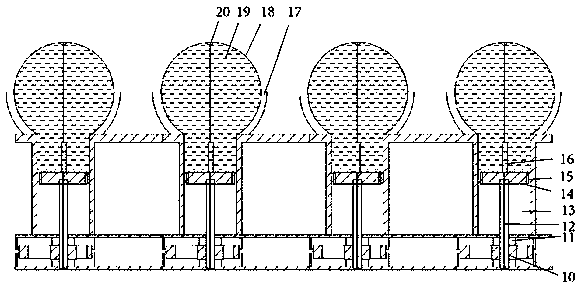
[0017] The invention provides a multi-head software joint flexible grasping industrial auxiliary mechanism, through the side-by-side linkage mode of a plurality of spherical soft grippers, thereby increasing the grasping area of the flexible grasping grasp, and the multiple spherical soft grippers adopt the original linkage method. Control, which simplifies the control and improves the grabbing efficiency, especially suitable for use in industrial production.
[0018] As an embodiment of the present invention, the present invention provides a multi-head software joint flexible grasping industrial auxiliary mechanism, including a base 1, a lower mechanical arm 2, a spherical flexible gripper 3, a flexible gripper fixing frame 4, a telescopic cylinder 5, an upper Mechanical arm 6, mechanical arm rotating shaft 7, telescopic push-pull rod 8 and m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More