

Improved active-disturbance-rejection control method of inverted pendulum system based on self fuzziness regulation in phase plane
A technology of active disturbance rejection control and inverted pendulum, which can be applied in adaptive control, control/regulation system, general control system, etc., and can solve problems such as large influence on control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings.
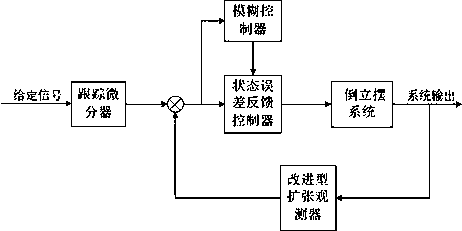
[0050] Such as figure 1 Shown, the concrete realization steps of the present invention are as follows:
[0051] 1) Assuming that the swing angle and swing speed are small, the mathematical model of the inverted pendulum system can be simplified as:
[0052]
[0053] in, is the quality of the trolley, is the mass of the pendulum, is the position of the trolley, is the pendulum angle, For the pendulum swing length, for the amount of control, is the moment of inertia of the pendulum around its center of mass.
[0054] take swing angle , swing speed , car position , trolley speed As a control index, transform the motion equation of the inverted pendulum into the form of the state equation, so that , then the above system equation of motion can be transformed into the following equation of state:
[0055]
[0056] in,
[0057] , with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More