

Throughput capacity-maximized unmanned aerial vehicle trajectory planning method
A technology of trajectory planning and UAV, which is applied in the field of UAV communication, and can solve problems such as hindering the search for the optimal solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments: taking this as an example to further describe and illustrate the present application.
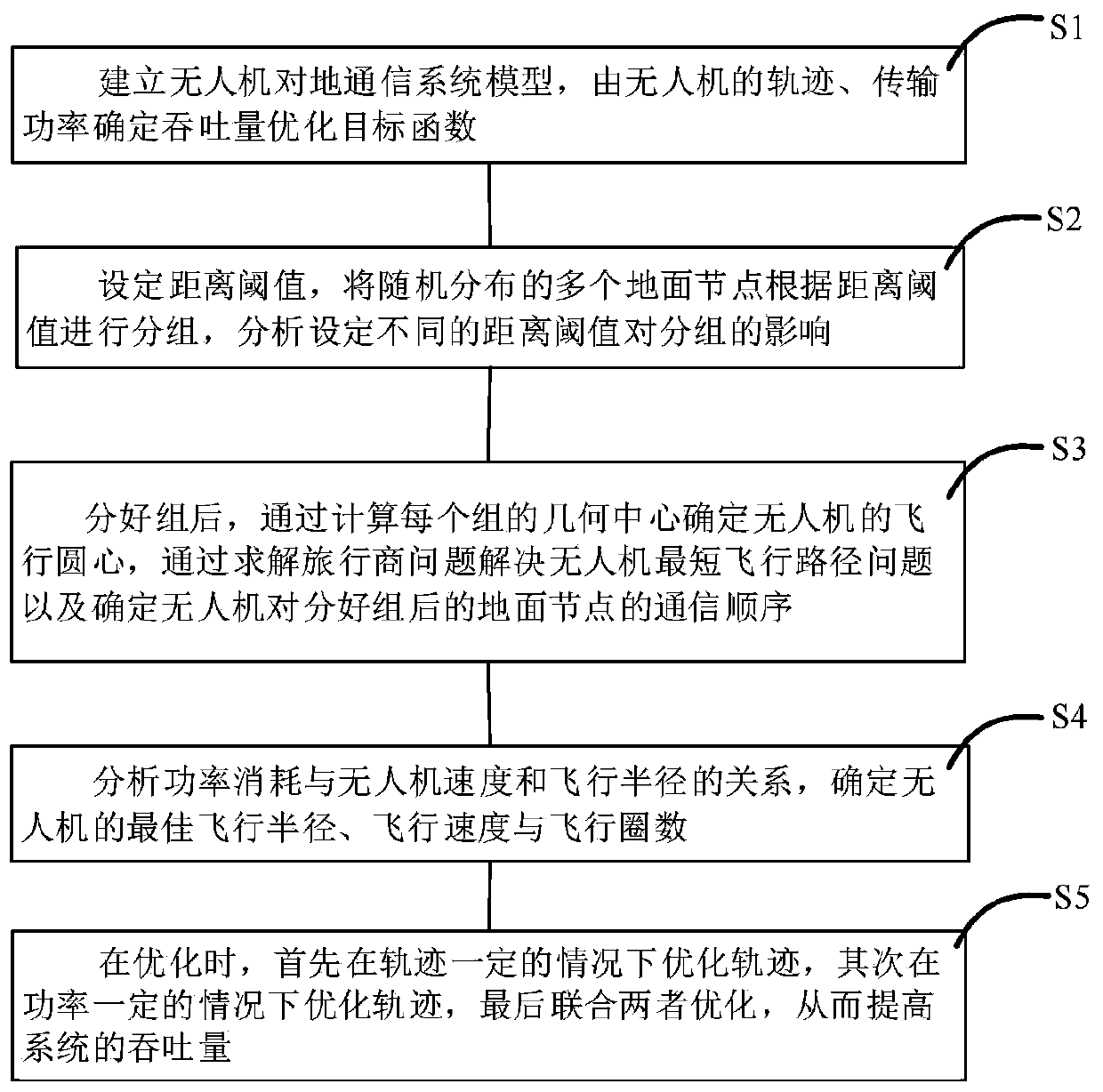
[0071] The present embodiment provides a method for planning a UAV trajectory with maximum throughput, comprising the following steps:
[0072] S1: Establish a UAV-to-ground communication system model, and determine the throughput optimization objective function by the trajectory and transmission power of the UAV;
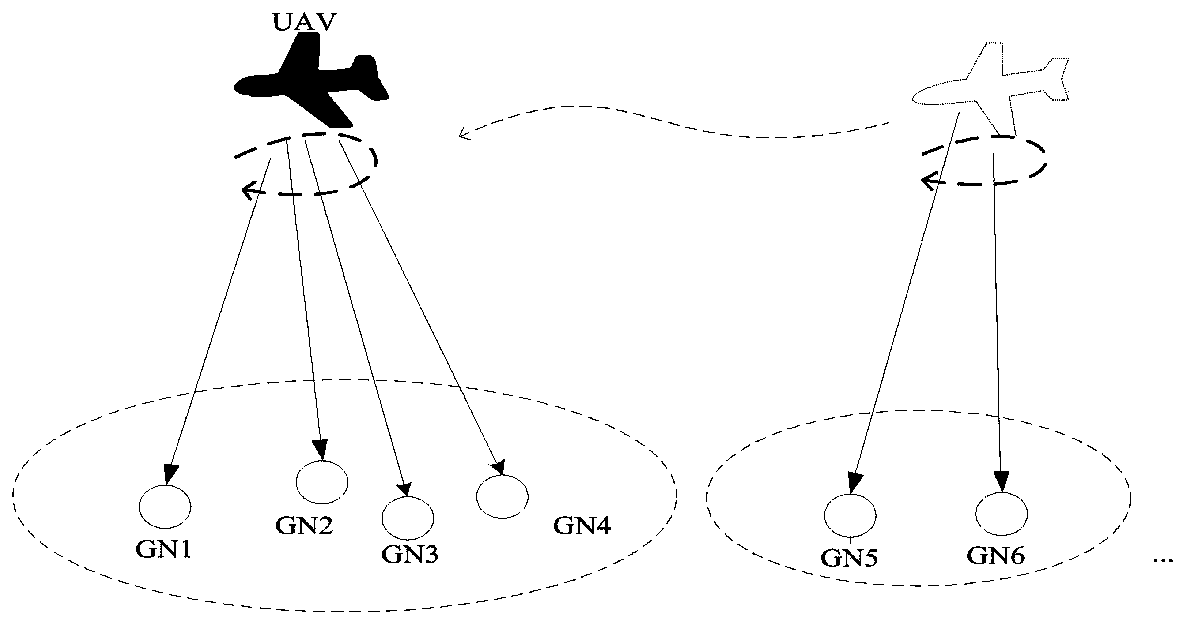
[0073] S1.1 as attached figure 2 As shown, the present invention considers a UAV communicating with multiple ground nodes, where the UAV acts as a mobile transmitter to transmit information to the ground nodes, and the location of the ground nodes is fixed and known by the UAV. Without loss of generality, we consider a three-dimensional Cartesian coordinate system, where the positions of ground nodes are denoted as g k =(x k ,y k ,0),...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More