Flexible gripper of multi-sensing robot and pneumatic control device
A technology of air pressure control and robotics, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as inability to perceive the grasping state
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
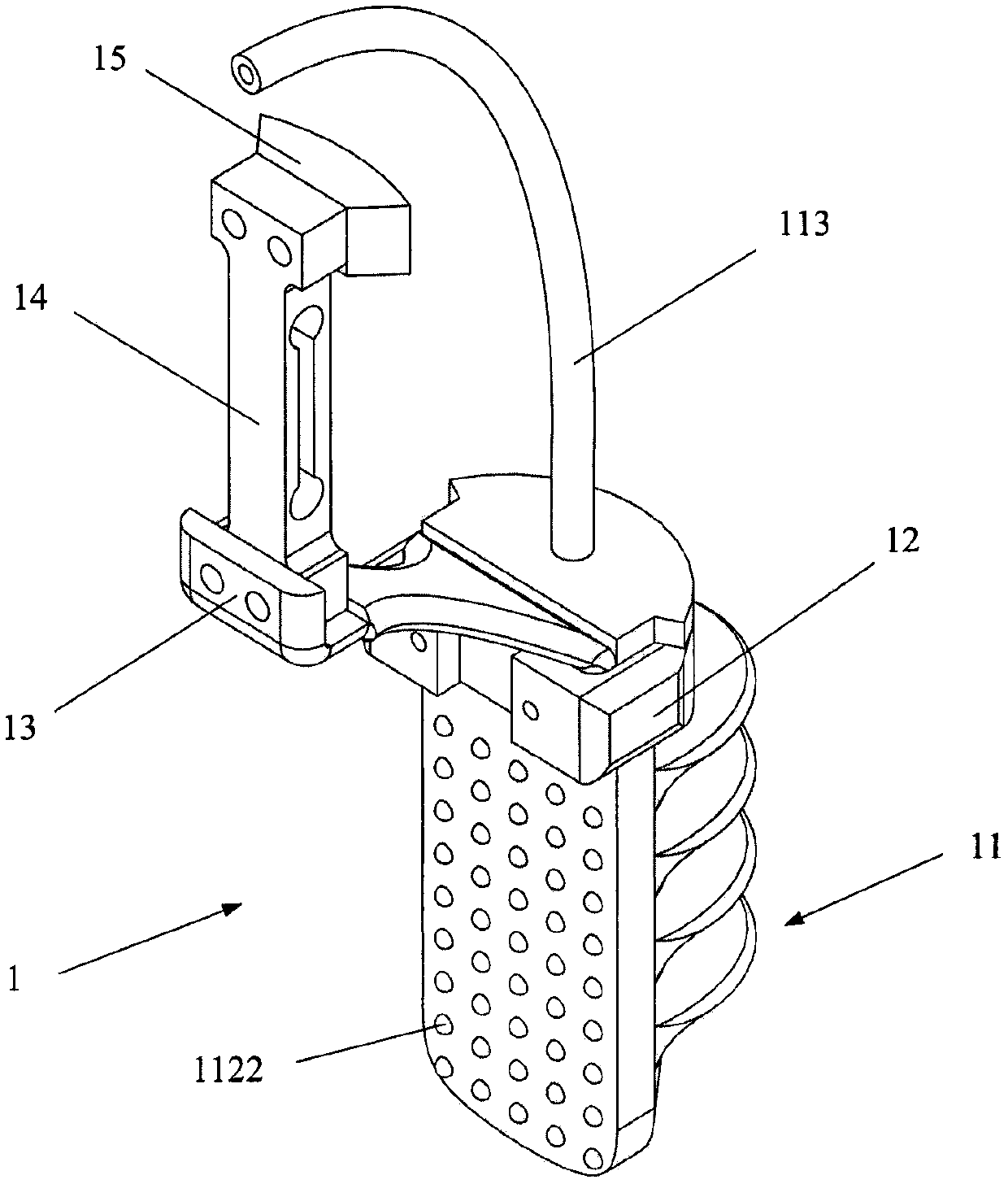
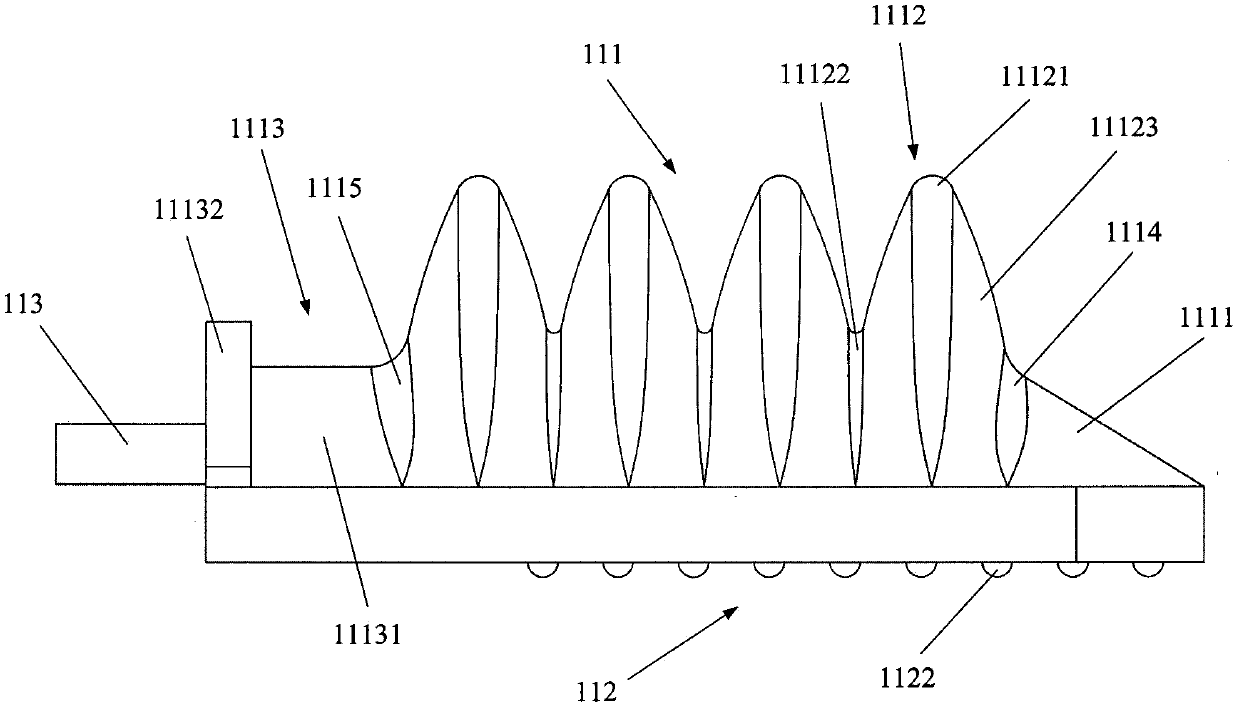
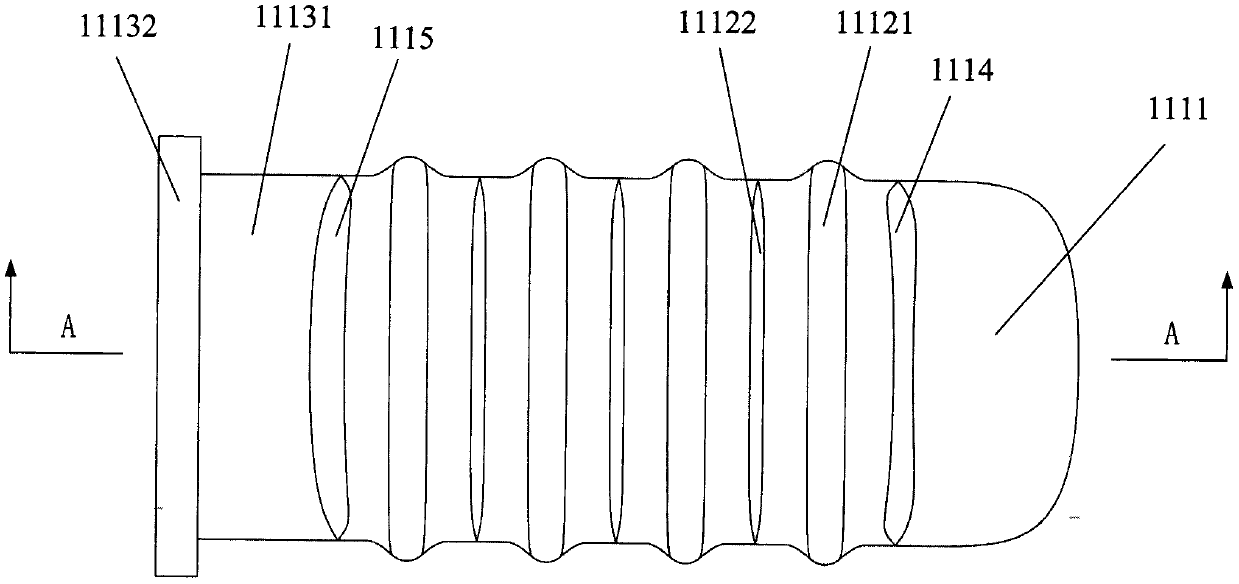
[0029] Such as figure 2 , image 3 , Figure 4 As shown, the single-airway flexible finger (11) includes a finger surface (111) and a finger base plate (112), and a slip sensor (1121) is arranged inside the finger base plate (112), and one side of the finger base plate (112) The surface is flat and the other side has a hemispherical boss (1122), the hemispherical boss (1122) is used to increase friction, and the flat side of the finger bottom plate (112) is connected to the finger surface (111) , the finger surface (111) and the finger bottom plate (112) form a single airway (114), and the finger surface (111) includes a fingertip (1111), a heel (1113) and at least one knuckle (1112) ), a fingertip transition arc (1114) is set between the fingertip (1111) and the knuckle (1112), and the knuckle (1112) includes a knuckle peak (11121), a knuckle valley (11122), a knuckle Nodal surface (11123), the knuckles (1112) are sequentially connected in series to form a wave-shaped str...
Embodiment 2
[0033] Such as Figure 9 As shown, the air pressure control equipment (4) described air pressure control equipment (5) includes an air pump (53), positive pressure control air circuit (52), negative pressure control air circuit (51), four-way quick connector (54), air pressure Control circuit module (55);
[0034] The four-way quick connector (54) includes a quick connector 1, a quick connector 2, a quick connector 3, and a quick connector 4;
[0035] The positive pressure control air circuit (52) includes a positive pressure electric proportional valve (521), a positive pressure buffer gas cylinder (522), a positive pressure on-off control solenoid valve (523), and the positive pressure electric proportional valve (521) The air inlet of the air inlet is communicated with the air pump (53) through the air pipe, and the air outlet of the positive pressure electric proportional valve (521) is communicated with the air inlet of the positive pressure buffer gas cylinder (522) thr...
Embodiment 3
[0040] Such as Figure 10 , Figure 11 As shown, the two-finger multi-sensory robotic flexible gripper includes A single-airway flexible finger module (1A), B single-airway flexible finger module (1B), A palm (2A), A measurement and control circuit module (3A), A hand Claw multi-way quick connector (4A);
[0041] The A palm (2A) is a cylindrical thin shell, one side of the A palm (2A) is open and the other side is closed, and the A1 force sensor installation hole (2A11), A2 force sensor installation hole (2A12), A2 force sensor installation hole (2A12), A laser ranging hole (2A2), the A1 force sensor mounting hole (2A11), A2 force sensor mounting hole (2A12) are symmetrical;
[0042] The structures of the A single airway flexible finger module (1A) and the B single airway flexible finger module (1B) are all the same as the structure of the single airway flexible finger module (1) according to claim 1, and the A single The airway flexible finger module (1A) passes through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com