Field end for assisting global positioning of unmanned vehicle in limiting scene and global positioning method
A positioning method and technology for unmanned vehicles, applied in image analysis, instruments, calculations, etc., can solve the problems of requiring secondary operations for changes, high cost of magnetic nails, and inability to deploy quickly, achieving low operation and maintenance costs and high layout efficiency. , the effect of reducing the communication burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
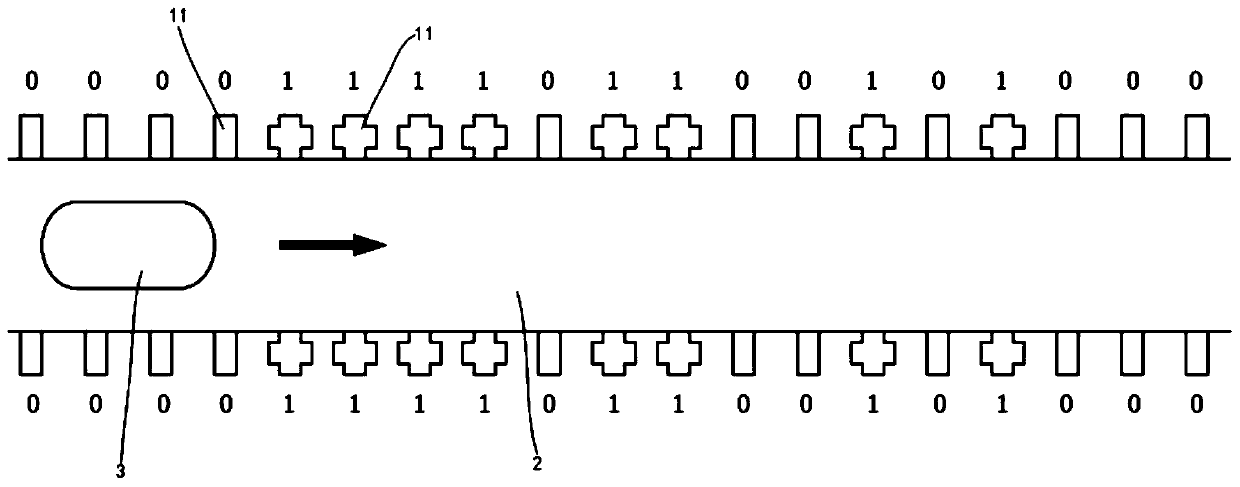
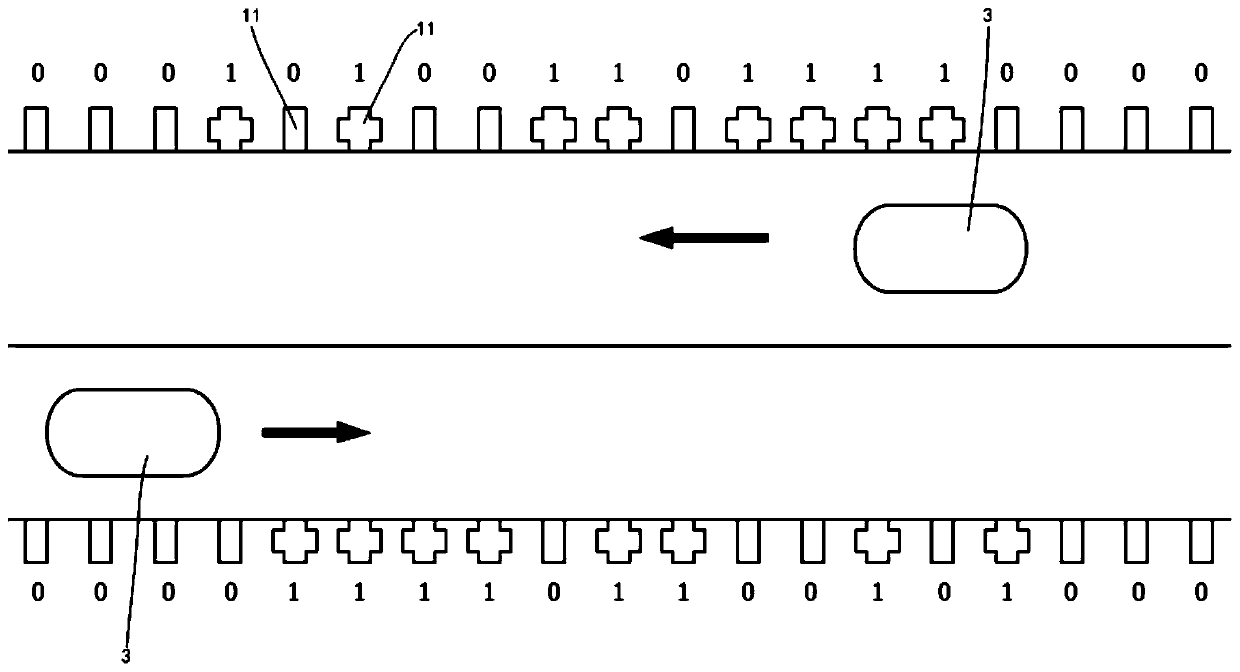
[0030] Such as figure 1 as well as figure 2 As shown, a field end for assisting the global positioning of unmanned vehicles in a restricted scene includes a variety of semantic feature patterns 11, and a variety of semantic feature patterns 11 are arranged on the road 2 of the unmanned vehicle in the restricted scene with a distance D according to the semantic cycle code. at least one side.
[0031] A variety of semantic feature patterns 11 are distinguished from each other, so that the vehicle end can be distinguished through visual inspection.
[0032] Semantic cyclic coding is composed of multiple code combinations, the multiple codes are in one-to-one correspondence with the above-mentioned various semantic feature patterns, and the periodic sequence of semantic cyclic coding has no ambiguity in the positioning uncertainty interval (that is, there is no People and vehicles will not recognize repeated codes), the distance D is calculated by the formula L=(D × (N-1)), L i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More