

A target object size measurement method of sparse point cloud
A measurement method and target object technology, which is applied in the field of target size measurement of sparse point cloud, can solve the problems that edge points are prone to large errors, point cloud requirements are also high, and the amount of calculation is large.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
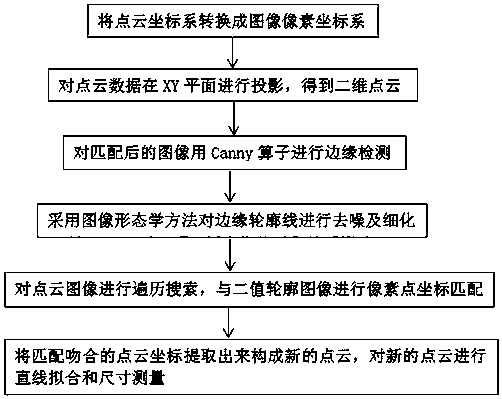
[0041] refer to figure 1 It can be seen that the target size measurement method of sparse point cloud includes the following six technical steps:
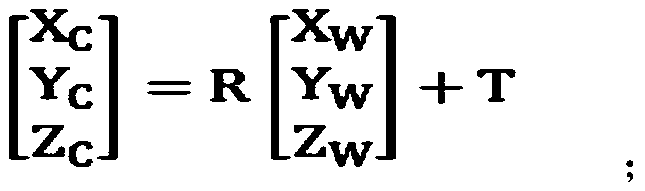
[0042] Step (1), convert the point cloud coordinate system into the image pixel coordinate system:
[0043] A. First build a binocular vision system, make a self-made black and white checkerboard, use the matlab calibration toolbox to calibrate, and get the internal parameter matrix and external parameter matrix R, T. The R obtained from the calibration is a 3*1 matrix. Through Rodriguez Transform transforms R into a 3*3 matrix;
[0044] B. The point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More