

Multi-microsatellite posture takeover failed spacecraft method with robustness differential game control
A micro-satellite and micro-satellite technology, applied in the direction of attitude control, etc., can solve problems such as not being suitable for space missions, not considering external interference, long-time neural network, etc., to achieve the effect of avoiding control allocation, reducing communication and avoiding allocation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0144] Using the following simulation scenario, suppose there are three microsatellites to take over the attitude control of the target spacecraft in the geostationary orbit, and their respective body coordinate system to reference coordinate system conversion matrices are:
[0145]
[0146] The moment of inertia matrix of the combined body is
[0147]
[0148] The disturbance torque is
[0149]
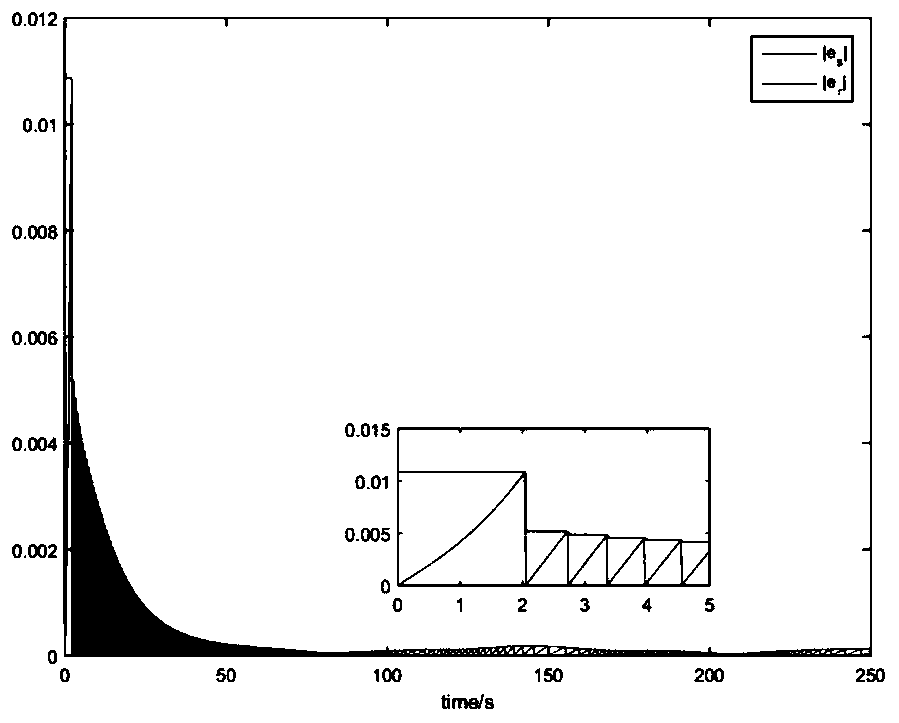
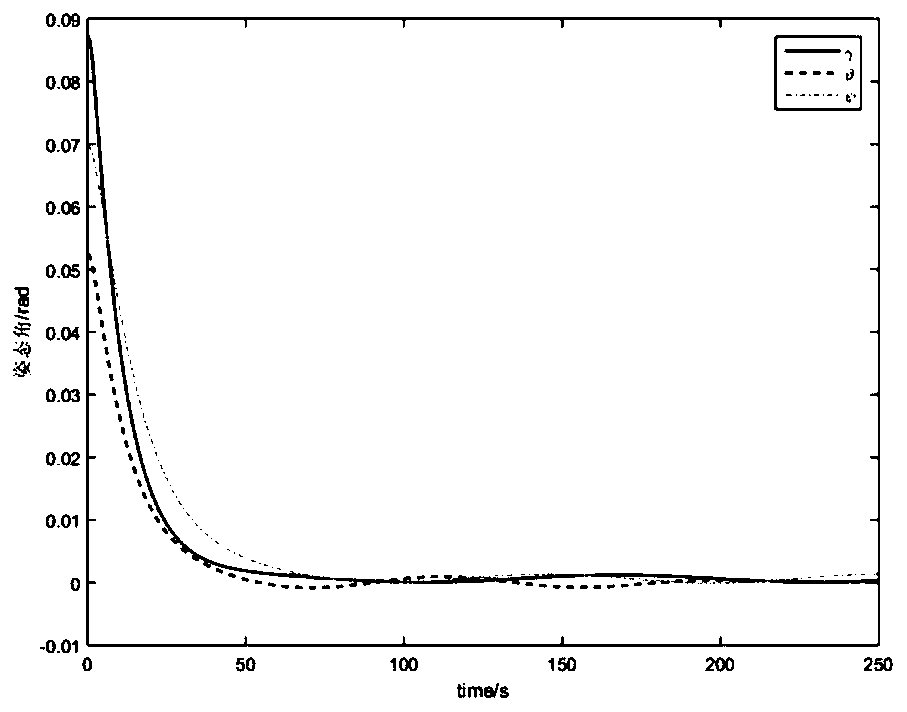
[0150] The initial value of the state quantity of the combination is x 0 =[0.087; 0.087; 0.087; 0; 0; 0], where the unit of the angle is radians. The maximum uniaxial control torque of the microsatellite is 0.04N.m. The simulation parameters of the trigger are α = 0.5, β = 0.0, 1 controller parameters are T 1 = T 2 = T 3 =0.01I 3 , Q 1 =Q 2 =Q 3 =0.003I 6 , R 11 =R 12 =R 13 =0.01I 3 , R 21 =R 22 =R 23 =0.01I 3 , R 31 =R 32 =R 33 =0.01I 3 .
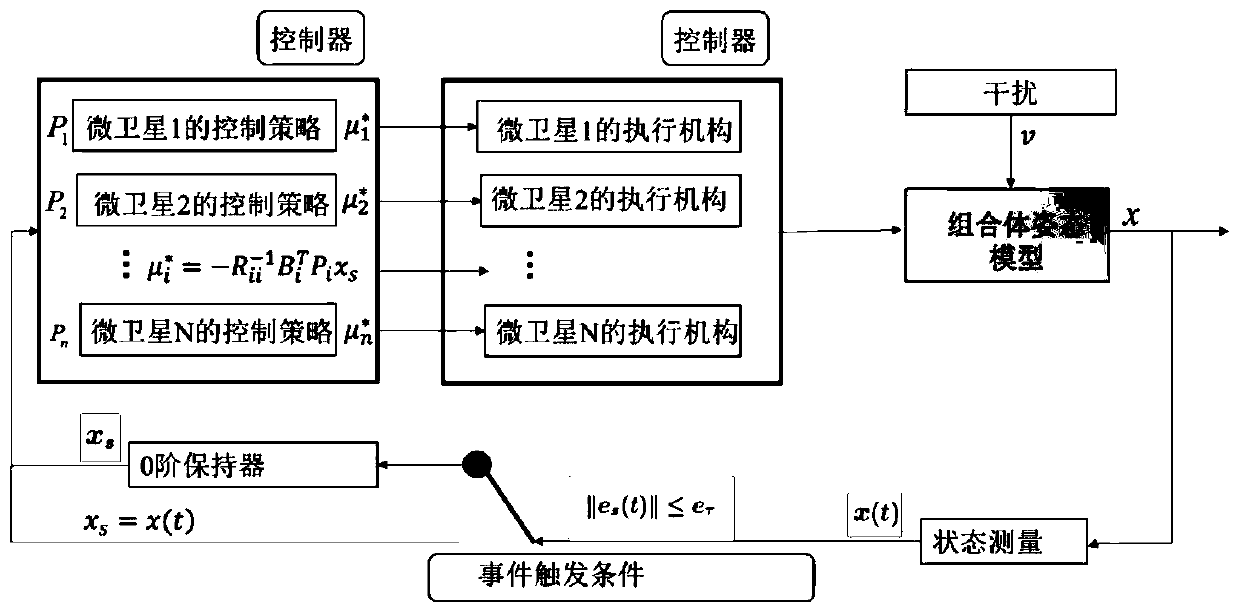
[0151] The specific implementation process is
[0152] The first step, initialization;
[0153] The second step is to judge by the trigger condition of f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More