

Cooperative active sensing method for rapid target searching of unmanned aerial vehicle (UAV) group
A target search and UAV technology, applied in the field of collaborative active perception for rapid target search by UAV groups, to achieve the effects of improving practicability and efficiency, improving execution efficiency, and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with accompanying drawing.
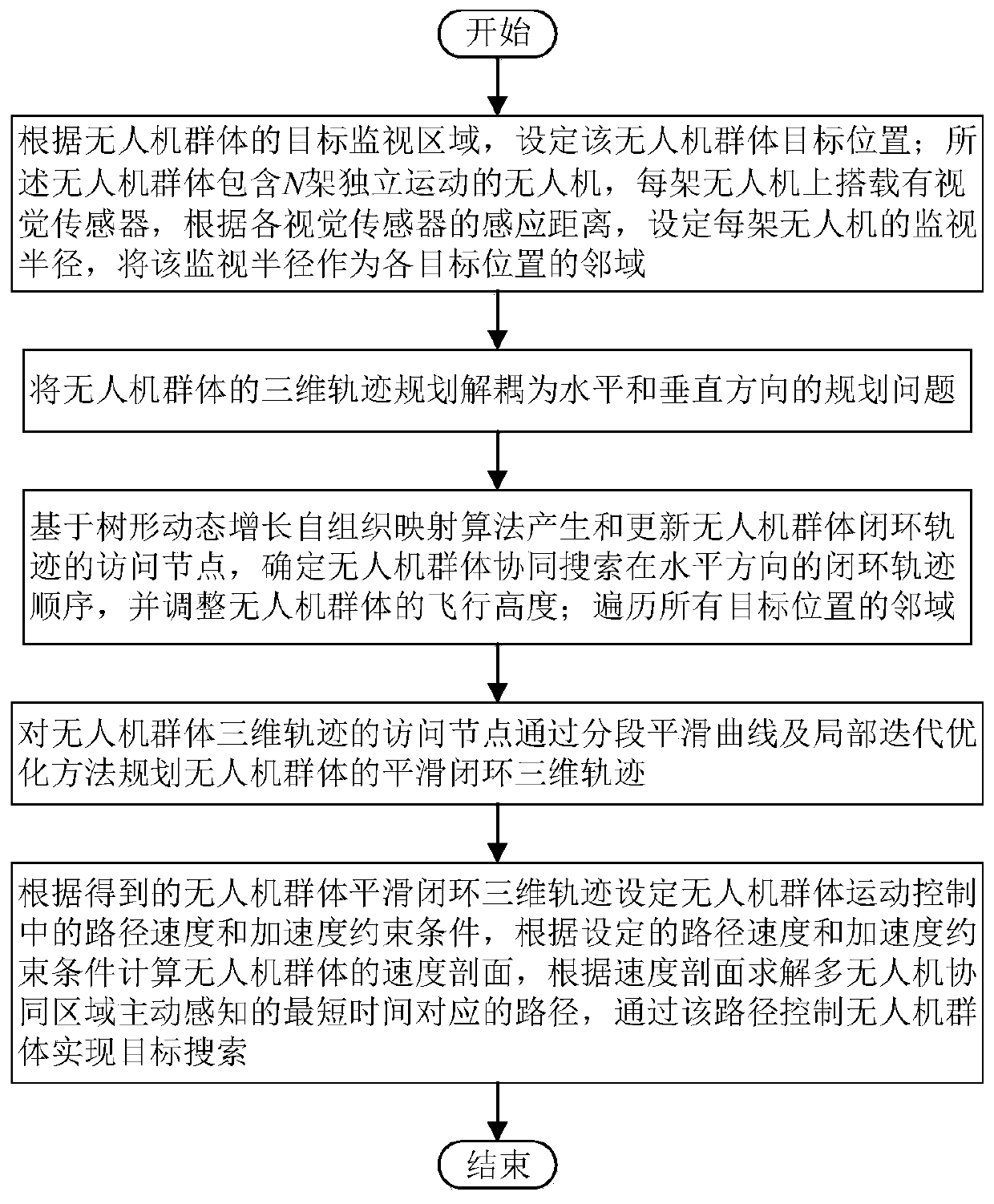
[0022] refer to figure 1 It is a flow chart of the cooperative active perception method for rapid target search of UAV swarms in the present invention, which is especially suitable for real-time and rapid detection of large-scale and incompletely known complex target areas by UAV swarms under multi-constraint conditions. Target search and track planning, the method specifically includes the following steps:
[0023] 1) Set the number N of UAVs, the starting point of each UAV, and the maximum number of iterations for subsequent calculations. According to the target monitoring area of the drone group, set n target positions of the drone group; the drone group includes N independently moving drones, and each drone is equipped with a visual sensor, according to The sensing distance of this visual sensor sets the surveillance radius R of every unmanned aerial vehicle (in thi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More