Multi-moving target tracking method based on three-dimensional layered graph model
A multi-moving target, three-dimensional layered technology, applied in the field of three-dimensional layered graph model, can solve the problem of high computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings.
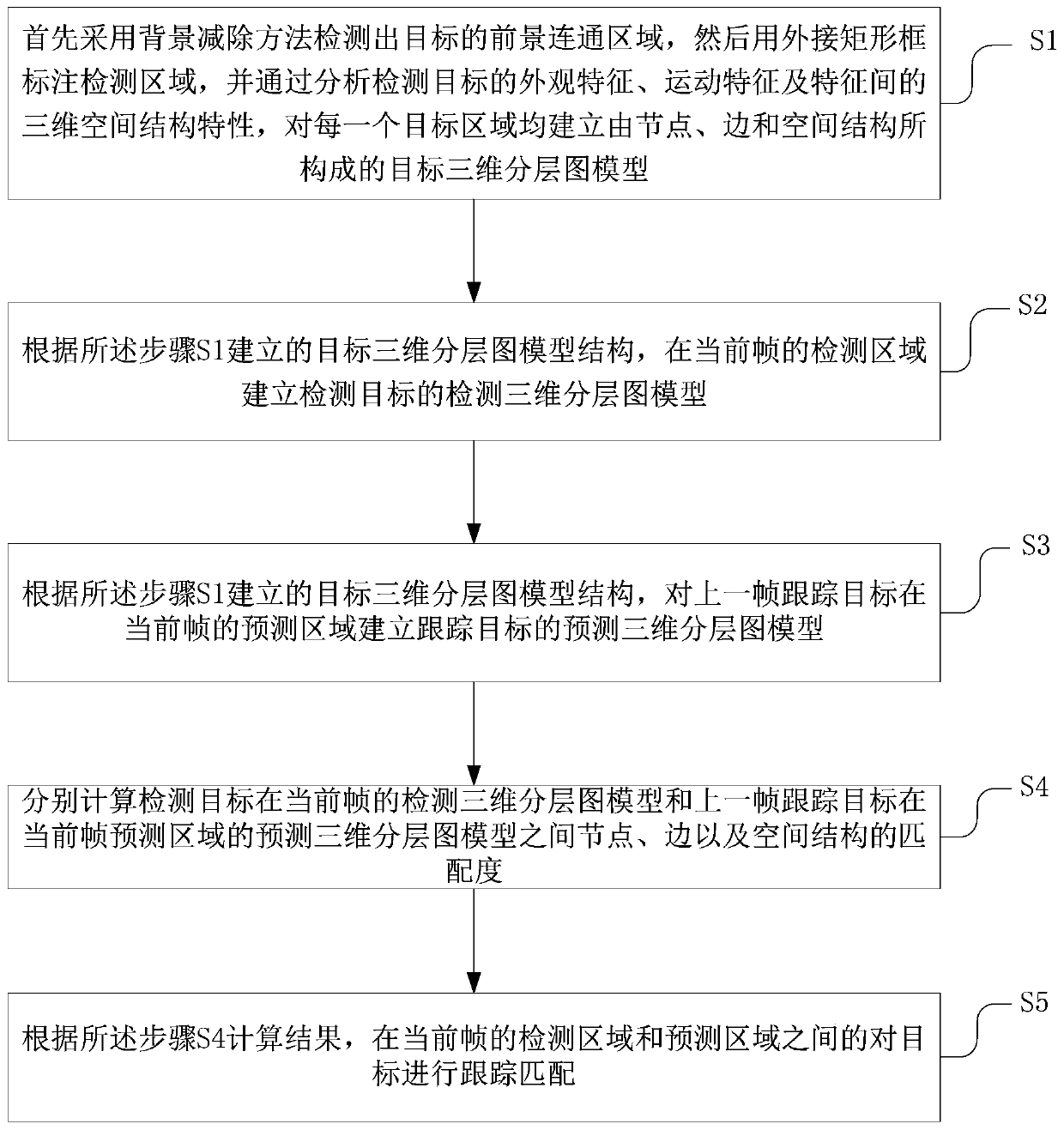
[0050] like figure 1 Shown, a kind of multi-moving target tracking method based on three-dimensional layered graph model, described method comprises the following steps:
[0051] S1. First, the background subtraction method is used to detect the foreground connected area of the target, and then the detection area is marked with a circumscribed rectangular frame, and by analyzing the appearance features, motion features and three-dimensional spatial structure characteristics of the detected target, each target area Both establish the target three-dimensional hierarchical graph model composed of nodes, edges and spatial structures;
[0052] S2. According to the target three-dimensional layered graph model structure established in the step S1, a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More