An ankle rehabilitation robot with anti-inertial force tipping balance
A rehabilitation robot and balance technology, applied to gymnastics equipment, sports accessories, etc., can solve the problems of inertia, secondary injury, and vulnerability to equipment, and achieve the effect of avoiding secondary injury.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
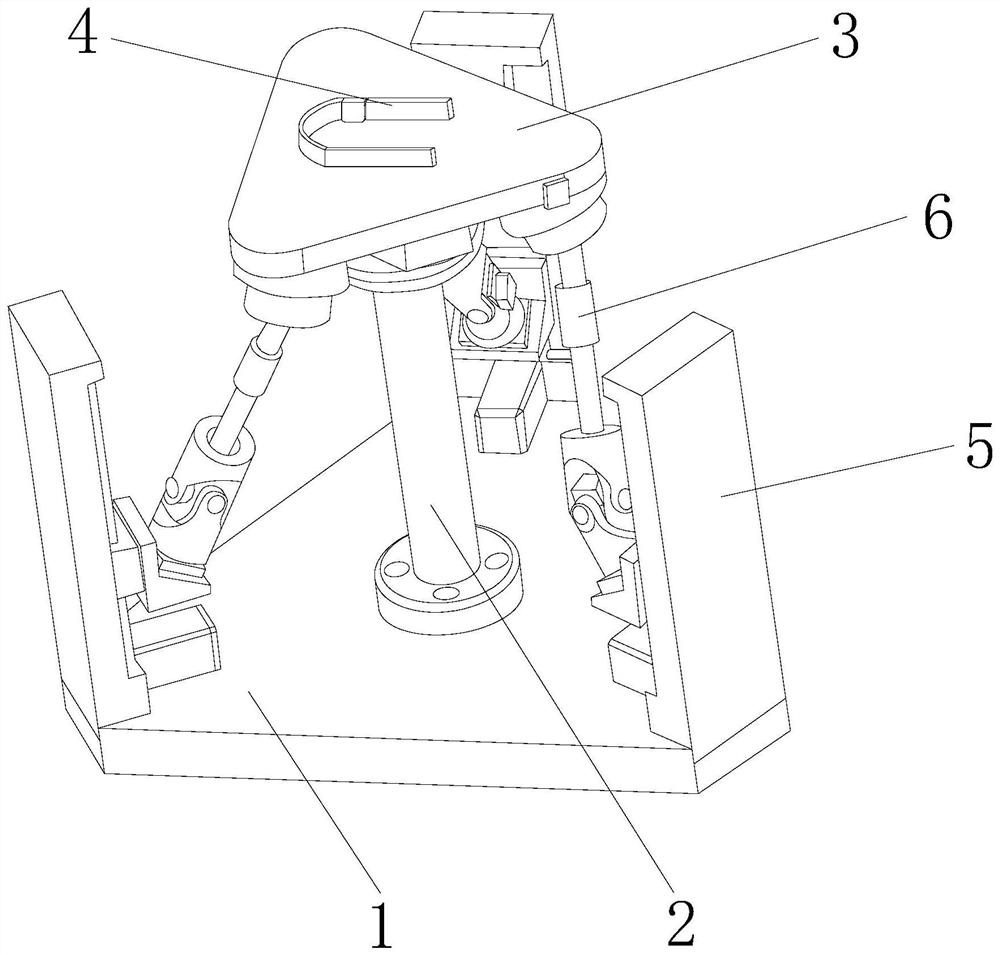
[0029] Such as Figure 1-Figure 6 As shown, the present invention provides a kind of technical scheme of the ankle rehabilitation robot with anti-inertial force toppling balance:
[0030] Such as Figure 1-Figure 2 As shown, an ankle rehabilitation robot with anti-inertial force tipping balance, its structure includes a base 1, a main shaft rod 2, a parallel plate 3, a sole positioning soft groove 4, a linear motion template 5, and a motion hinge 6. The base 1 is in the form of Triangular structure, the main shaft rod 2 is placed in the middle of the upper surface of the base 1 and connected vertically by electric welding, the parallel plate 3 is arranged on the upper end of the main shaft rod 2 and connected by electric welding, the sole positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More