Unmanned ship autonomous dynamic collision avoidance method based on SBG and dynamic window constraints
A dynamic window, unmanned ship technology, applied in non-electric variable control, two-dimensional position/channel control, instruments and other directions, can solve problems such as easy to cause danger, dynamic can not achieve collision avoidance output, etc., to ensure safety Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
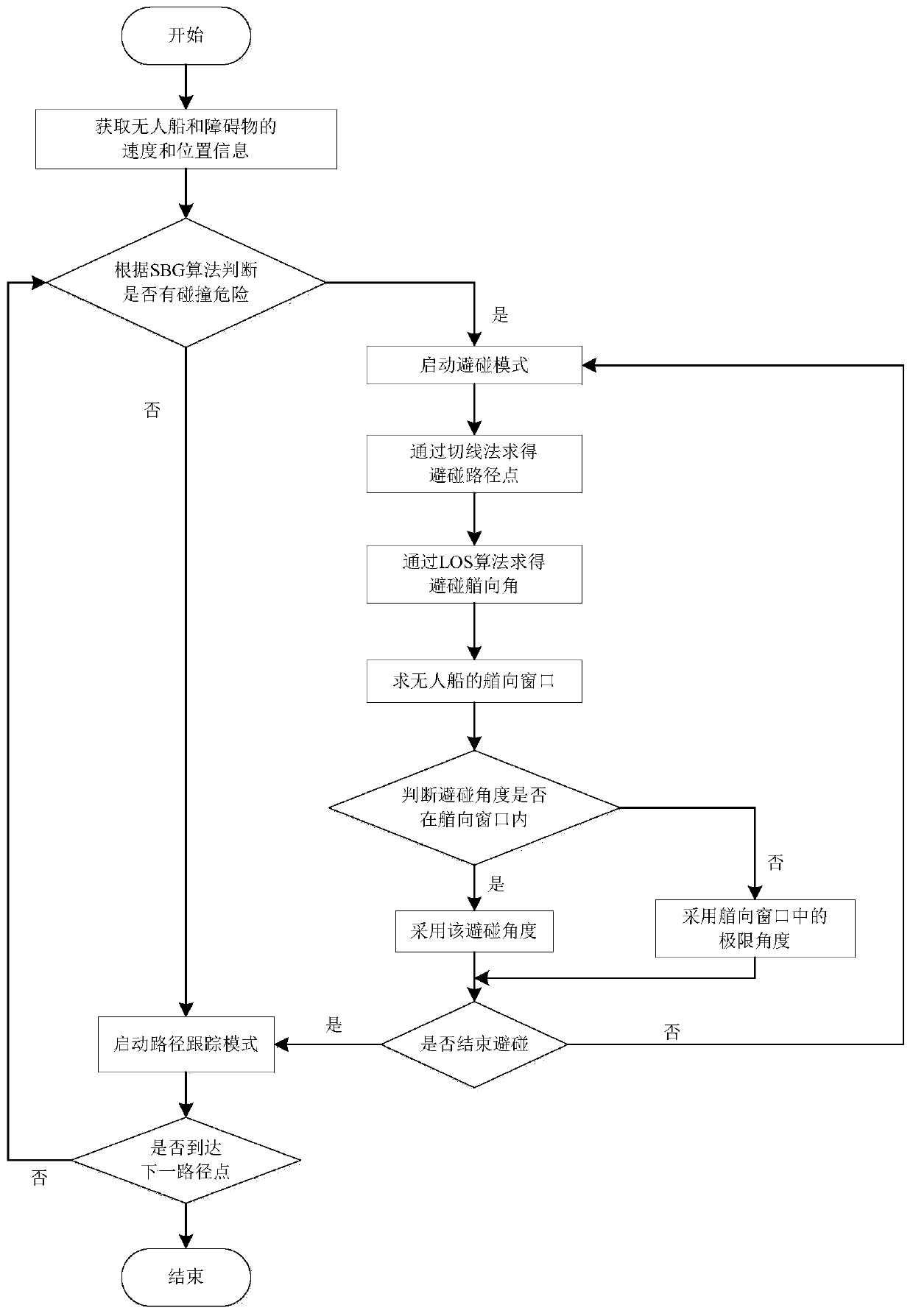
[0032] like figure 1 As shown, the autonomous dynamic collision avoidance method for unmanned ships based on SBG and dynamic window constraints of the present invention comprises steps:
[0033] Step 1: Obtain the speed information and position information of the unmanned ship and the obstacle, and judge whether the unmanned ship should track the track or avoid the obstacle according to the SBG switching method;
[0034] The SBG switching method is as follows: when the distance between the unmanned ship and the obstacle is within 100m, and the distance gradually shortens with time, the unmanned ship switches from the path tracking mode to the collision avoidance mode; otherwise, the unmanned ship maintains the path tracking mode, Navigate to the next waypoint at a constant speed.
[0035] like figure 2 As shown, the area a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More